

Method for controlling vibration of flexible manipulator based on vibration observer
A technology of flexible manipulators and observers, applied in the direction of manipulators, manufacturing tools, etc., can solve problems affecting the dynamic characteristics of flexible arms, complex system structure, high cost, etc., achieve the goal of tracking specified input without deviation, simplifying system structure, and saving costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing.
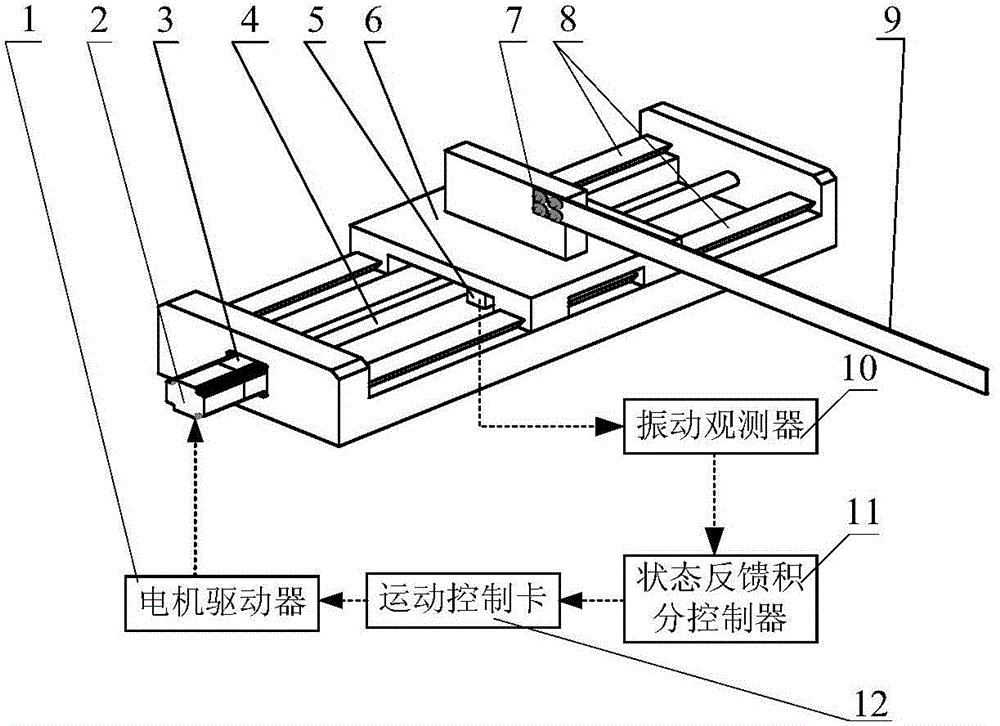
[0027] A specific system using the method of the present invention is as figure 1 As shown, the servo motor 2 drives the slider 6 to move on the guide rail 8 through the reducer 3 and the ball screw 4, and one end of the flexible mechanical arm 9 is rigidly connected to the slider 6 through the bolt 7; the displacement of the slider 6 is carried out by the grating ruler 5 For measurement, the vibration signal at the end of the flexible mechanical arm 9 is observed by the vibration observer 10 . Utilize the vibration signal obtained by the vibration observer 10, obtain the control signal through the state feedback integral controller 11, use the motion control card 12 and the motor driver 1 to output the control signal to the servo motor 2, control its motion, and realize the positioning of the end of the flexible mechanical arm 9 while suppressing residual vibration.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More