

Three-degree-of-freedom series-parallel type robot for traditional Chinese medicine manipulation and massage
A hybrid and robotic technology, applied in the direction of kneading massage appliances, vibration massage, massage auxiliary products, etc., can solve the problems of difficult control, low flexibility and simulation degree, and many degrees of freedom of movement, and achieve mechanism motion solution Good coupling, high flexibility and simulation, convenient operation and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
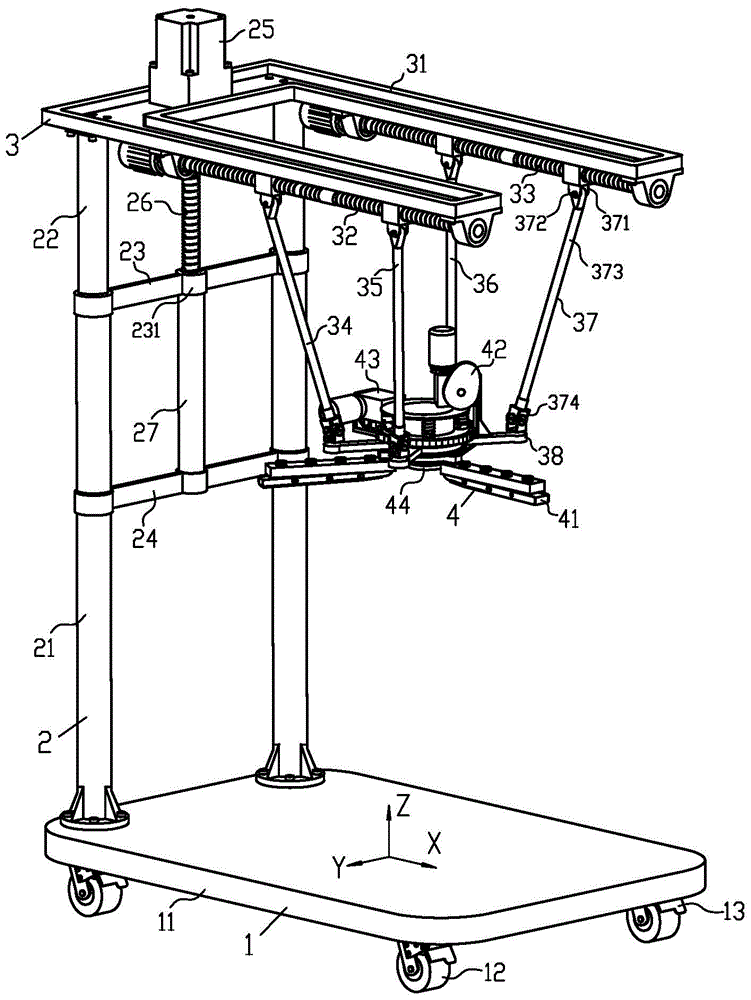
[0033] Such as figure 1 , figure 2 and Figure 8 As shown, a three-degree-of-freedom mixed-type traditional Chinese medicine massage robot includes a mobile base 1 for carrying and walking, a lifting device 2 installed at one end of the mobile base 1, a parallel bracket 3 on the top of the lifting device 2 and a mounting The massage executive part 4 at the lower end of the parallel bracket 3 . Wherein, the mobile base 1 includes a base support plate 11 and four sets of road wheels 12 installed on the lower surface of the base support plate 11, and wheel brakes 13 are arranged on the road wheels 12; the lifting device 2 can be used to adjust The height of the parallel support 3 and the massage execution part 4, the parall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More