

Machine vision-based intelligent control method and machine vision-based intelligent control system for industrial robot
An industrial robot and machine vision technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inability to implement changes in the collection of on-site signal operations, insufficient flexibility and intelligence of robots, and achieve economical and simple integration and maintenance, software and hardware interaction. Strong changeability and high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
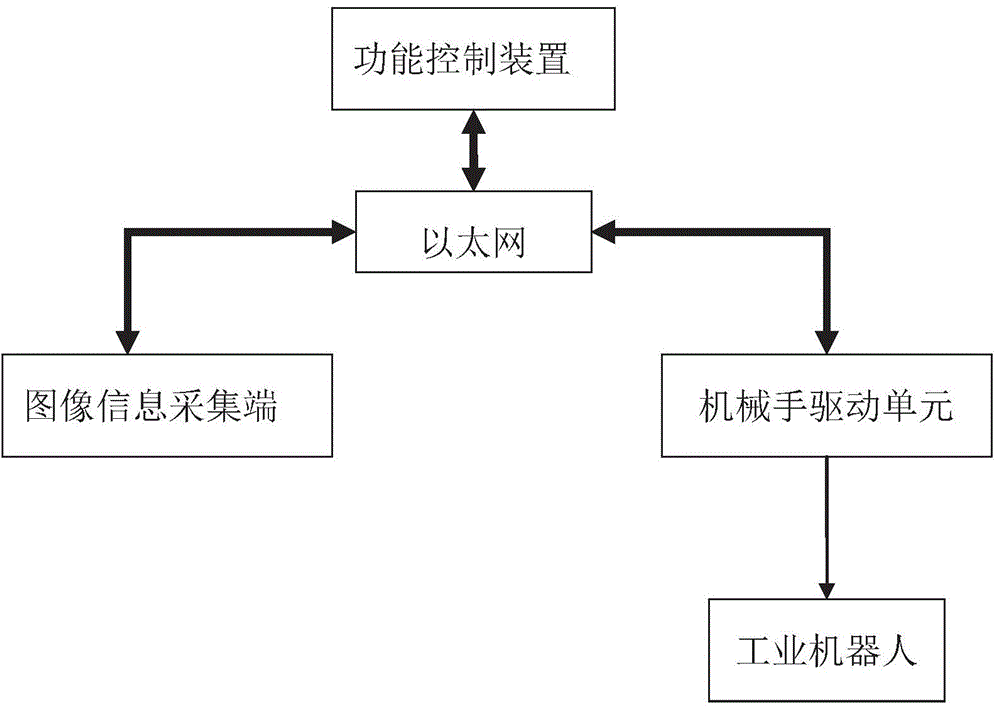
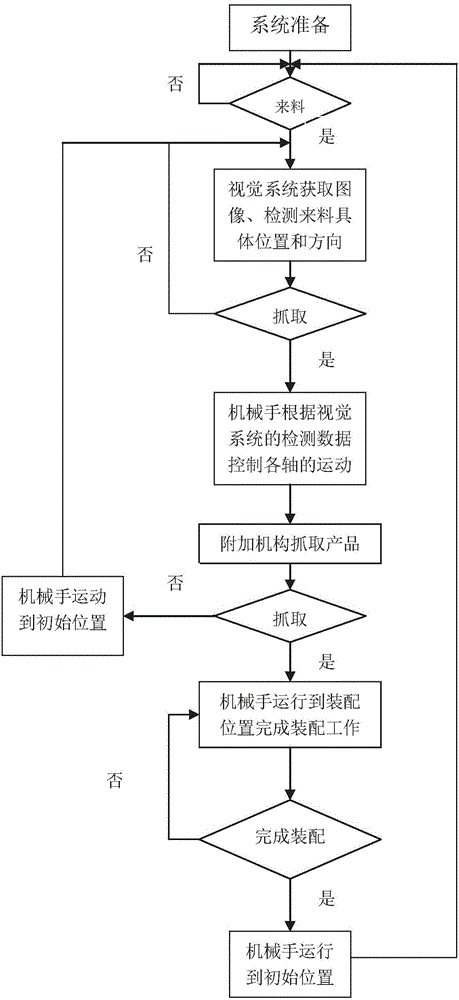
[0027] Example: see figure 1 and figure 2 , the present embodiment provides an intelligent control method for an industrial robot based on machine vision, which includes the following steps:
[0028] (1) Based on GigE Vision Gigabit Ethernet image transmission, an image information acquisition terminal is set, which includes at least one camera and its control circuit, to collect information sources;
[0029] (2) A function control device is set, and an integrated circuit board is arranged in the device, and an I / O function module, a data storage function module, a central processing module, a data calculation module and a wireless transmission function module are integrated on the circuit board;
[0030] (3) An industrial robot based on the EtherCAT field bus system is set, which includes a mechanical arm and a drive unit;
[0031] (4) When working, when the incoming material enters the shooting range of the camera, the image information acquisition terminal transmits the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More