

Digital spinal surgery device based on micro clearance positioning
A surgical device and micro-gap technology, used in surgery, medical science, diagnosis, etc., can solve the problems of high cost, low positioning accuracy, intraoperative radiation exposure, etc., and achieve the effects of simple operation, high positioning accuracy, and wide application range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
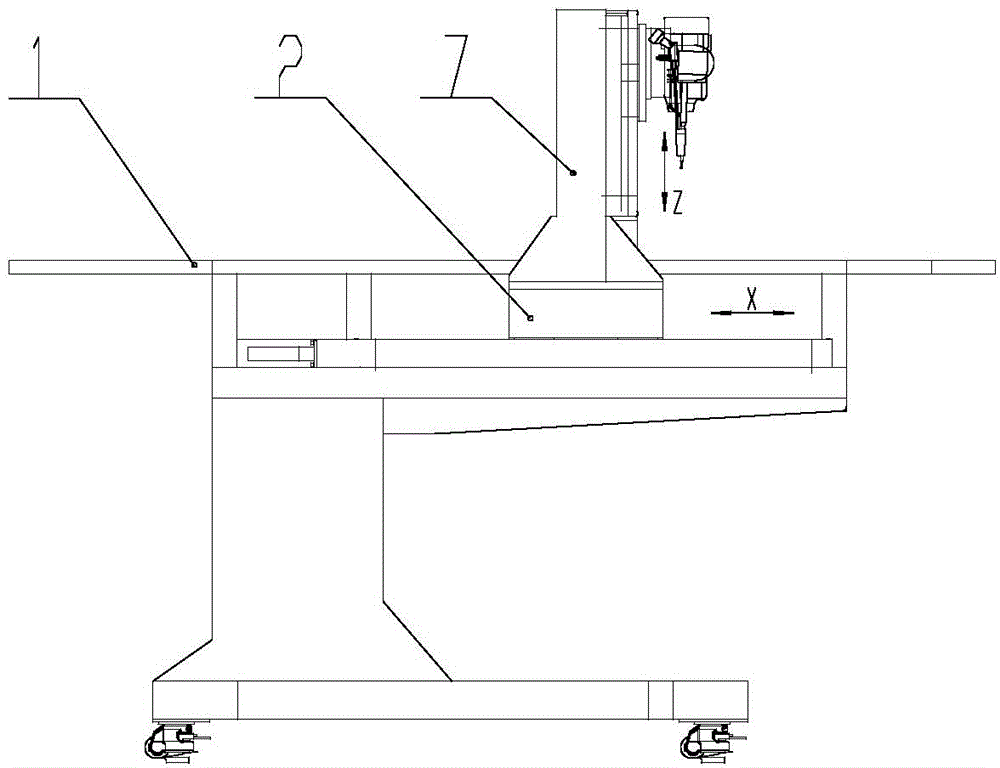
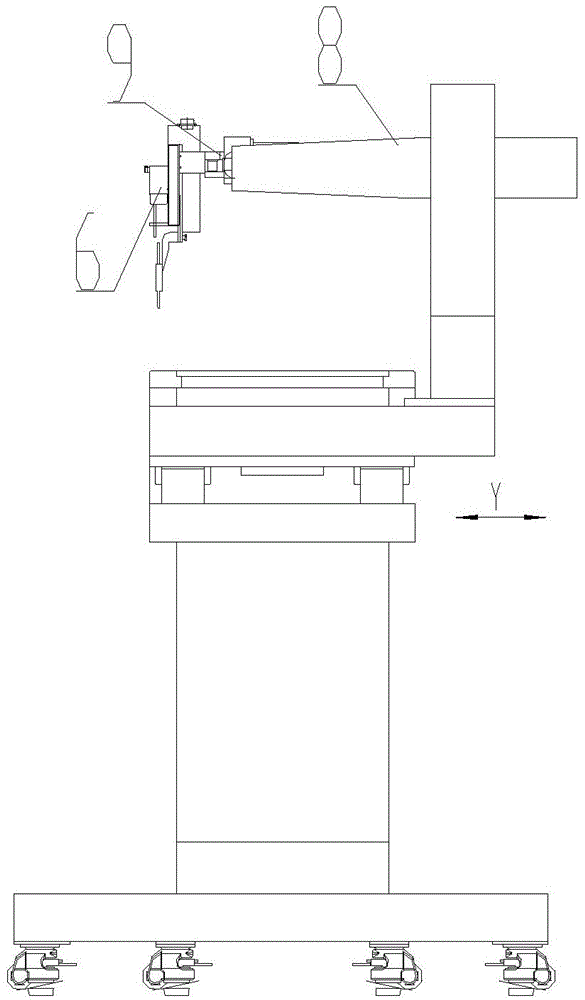
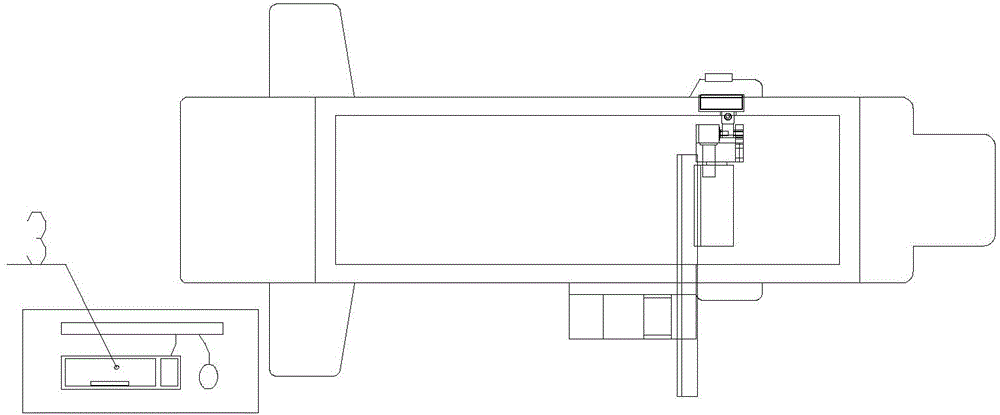
[0042] Such as Figure 1-22A spinal digitized surgical device based on micro-gap positioning shown includes a carrying platform 1 on which a controller 3 is arranged, and an X-axis guide rail is arranged on the carrying platform 1 . At the same time, a moving assembly 2 is slidably connected to the X-axis guide rail, which is different in that: the Y-axis guide rail is arranged on the mobile assembly 2 adopted in the present invention, and a column 7 is slidably connected to the Y-axis guide rail. In addition, a Z-axis guide rail is distributed on the column 7, and a beam 8 is slidably connected to the Z-axis guide rail. Considering the convenience of assembly and connection, a universal interface 9 is provided on the beam 8 . In this way, the navigation robot 5 or the decompression combined robot 6 can be connected to the universal interface 9 respectively. At the same time, in order to ensure the accuracy of the follow-up operation, the navigation robot hand 5 is connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More