

Control system of wearable robot for helping disabled
A control system and robot technology, which is applied in the field of robots, can solve the problems of insufficient safety, unguaranteed real-time performance, and insufficient precision of control methods, and achieve the effect of large capacity and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
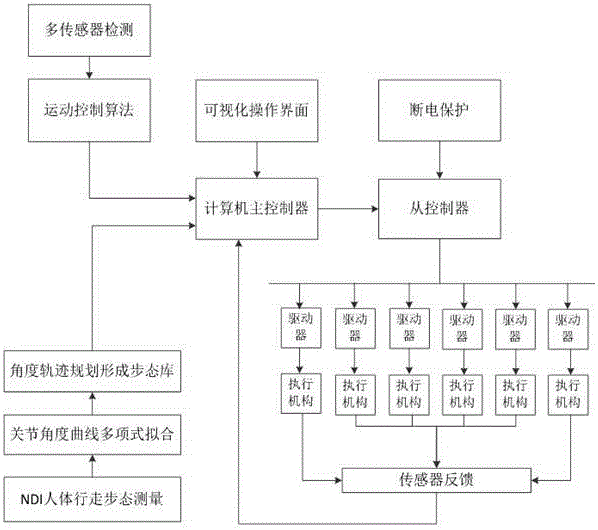
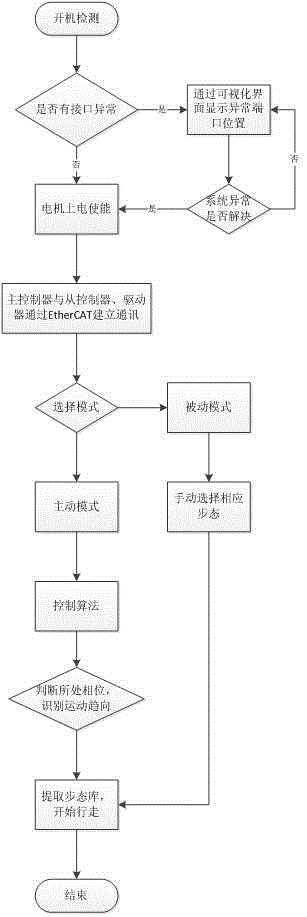
[0033] In the embodiment of the present invention, refer to figure 1 and figure 2 , the control system of the wearable robot for the disabled includes a main controller module. The present invention uses an Advantech industrial control computer based on the Windows operating system, which is used to run algorithms, call gaits, plan trajectories, read feedback and control the work of each module. Use the Qt development environment to write the program, compile the program running results and communicate to the slave controller through the EtherCAT field bus, and display the corresponding information on the visual operation interface, with a human-computer interaction interface; the slave controller is the control of the subnet Device, what the present invention adopts is the Gold Maestro Network Motion Controller of ELMO Company, plays the effect of gateway, based on TCP / IP agreement, receives master controller instruction through RJ45 port and forwards to each driver and modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More