

Football robot bottom control method based on fuzzy control
A football robot, fuzzy control technology, applied in attitude control, adaptive control, general control system, etc., can solve the problems of inaccurate image recognition, inability to achieve control effect, incomplete symmetry, etc., to achieve easy computer control, Improve the reaction speed and control accuracy, and the effect of simple control rules
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] refer to figure 1 , figure 2 and image 3 , the present invention, concrete steps include:
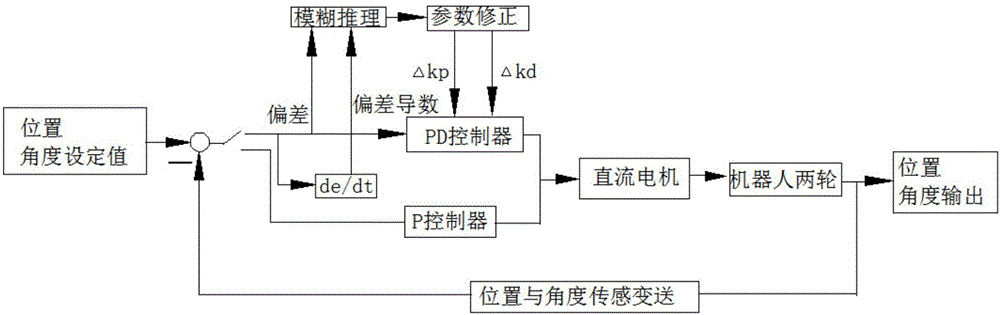
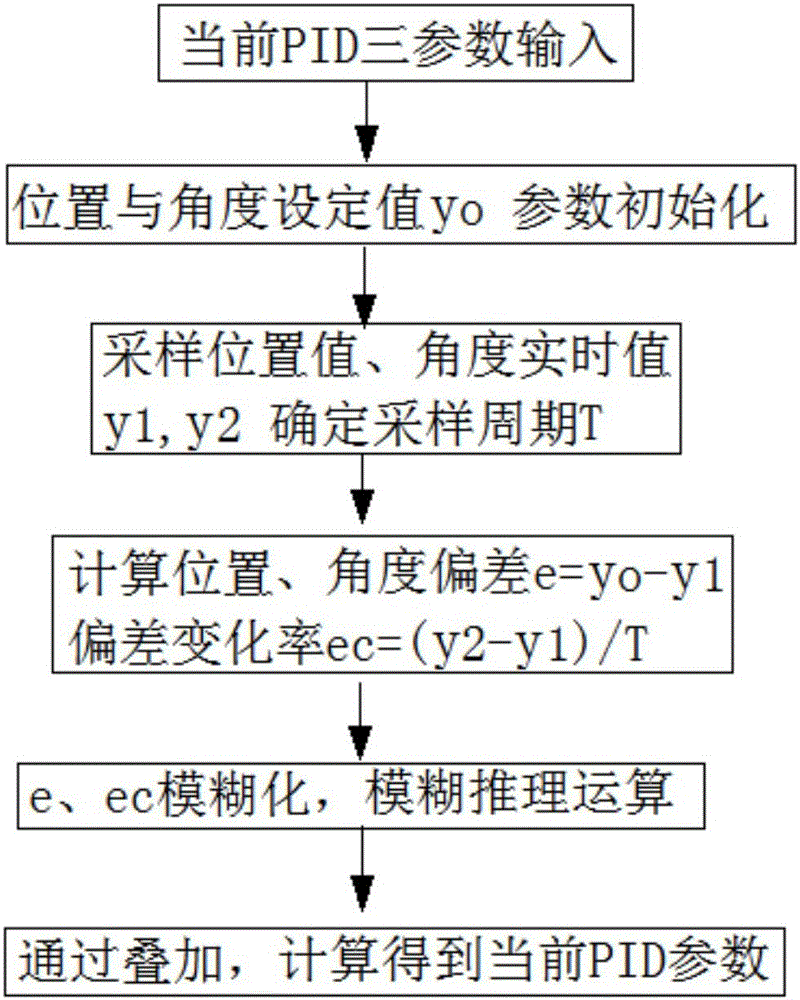
[0023] Step 1. Obtain the real-time value of the current position and speed of the soccer robot through the camera, and compare it with the set value of the position and angle to calculate the deviation e and the rate of change ec of the deviation;
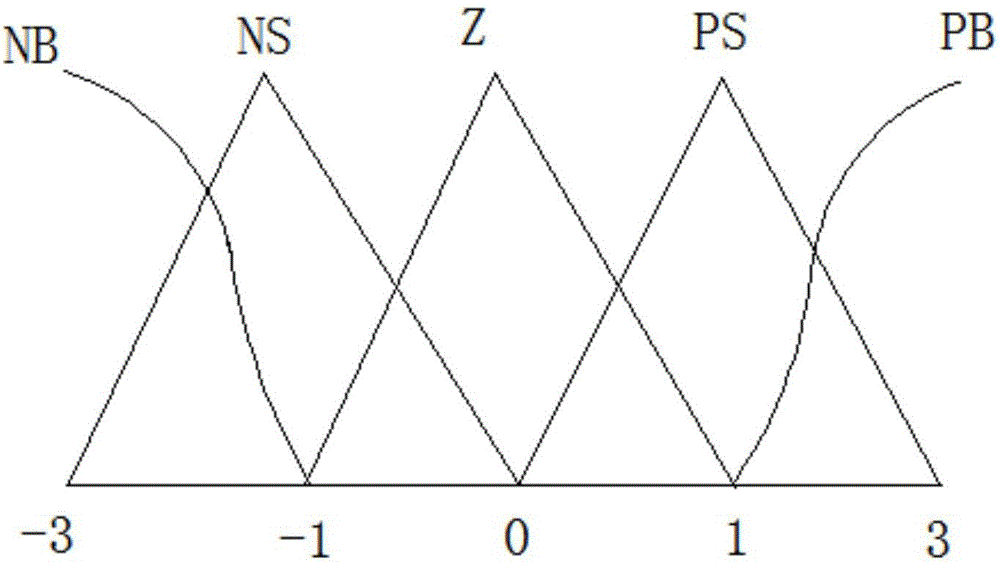
[0024] Step 2, taking the deviation e and the rate of change ec of the deviation as the input of the fuzzy PD controller, and obtaining the correction values of the two parameters of PD through fuzzification, fuzzy reasoning, defuzzification, etc.;
[0025] Step 3, use the corrected controller output as the input of the DC motor, thereby adjusting the position and angle of the soccer robot to achieve the purpose of control;
[0026] Step 4: Measure the transmission position and angle again and perform a second correction.
[0027] The position and angle deviation e=the position and angle setting value yo-t measured value y1; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More