Loading type control system of lower limb exoskeleton robot
An exoskeleton robot and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that the research on the control system of heavy-duty lower limb exoskeleton robots started late, the robot is difficult to adapt to the environment with complex terrain, and the technology is immature. and other problems, to achieve the effect of simple structure, small size and easy wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
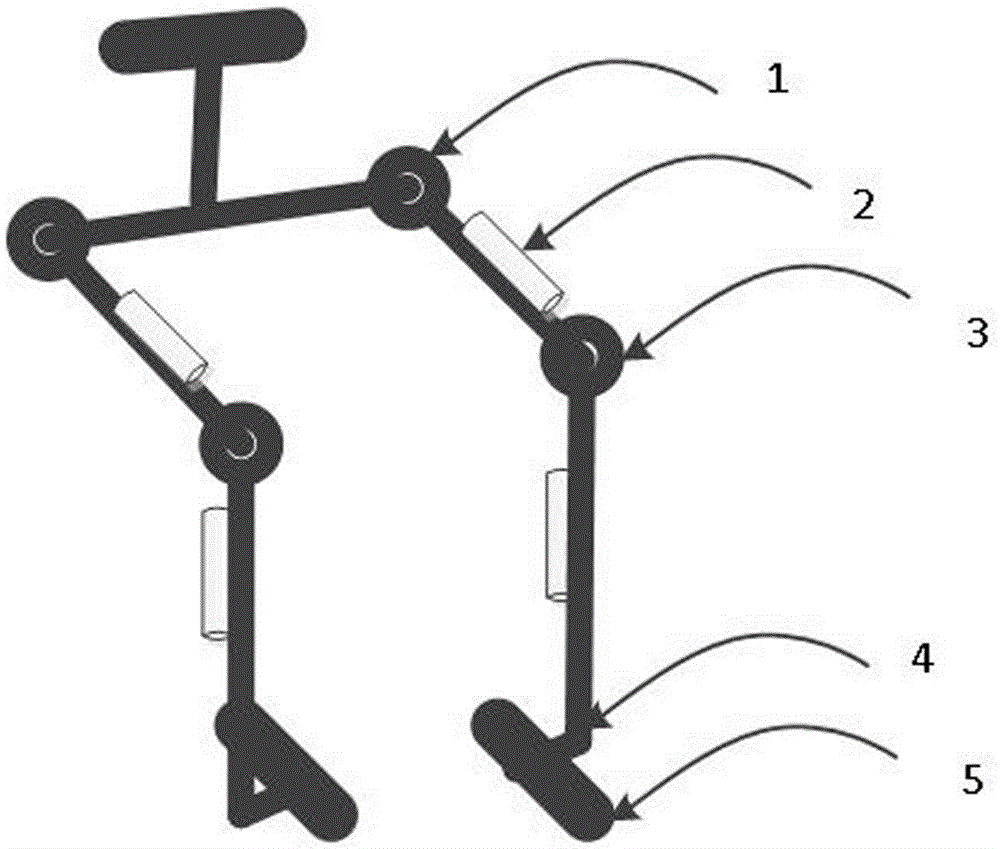
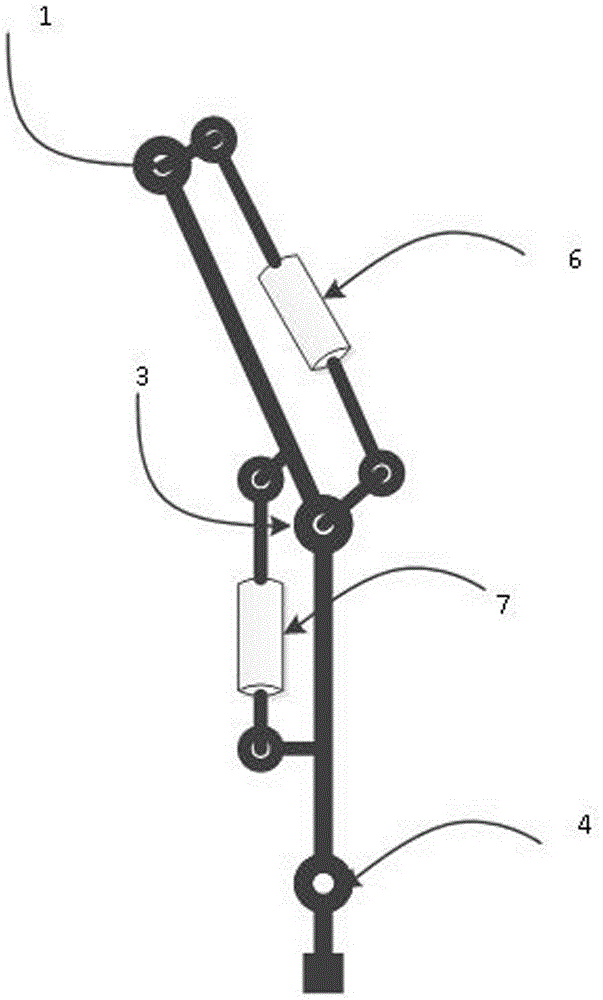
[0025] In the embodiment of the present invention, please refer to Figure 1-5 As shown, the present invention discloses a control system of a heavy-duty lower limb exoskeleton robot, which is composed of two subsystems with the same function. Each subsystem is mainly composed of four parts: signal acquisition device, microcontroller, motion actuator and control algorithm.
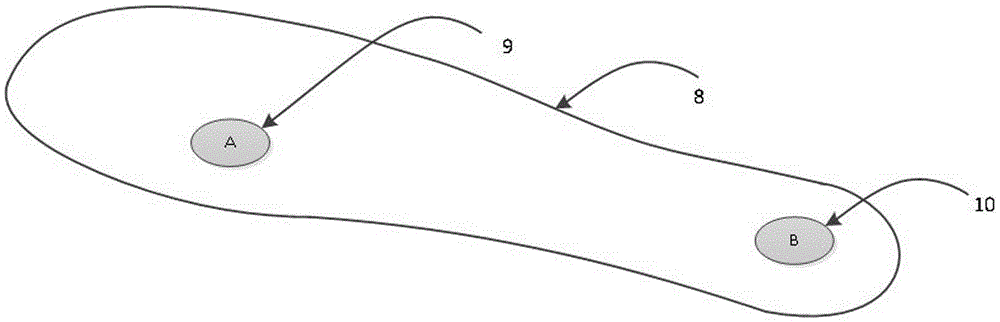
[0026] The signal acquisition device uses a thin film pressure sensor to collect the wearer's plantar pressure. For the installation position of the thin film pressure sensor on the bottom surface of the robot boot 5, please refer to image 3 , there are two force points on the force contact surface 8 of the robot boot, which are respectively the force point 9 in front of the robot boot and the force point 10 behind the robot boot. The thin-film pressure sensor is placed in the groove of the two stress points, and a round hard rubber gasket is placed on the upper part, making it slightly higher than the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More