

Space manipulator full-state dynamic semi-physical simulation system
A space manipulator, semi-physical simulation technology, applied in the direction of electrical digital data processing, special data processing applications, instruments, etc., can solve the problem of fast physical simulation of full-state dynamics without a space manipulator, to improve communication reliability and The effects of stability, reducing dependence, and reducing the difficulty of model selection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments:
[0030] The present invention performs dynamic modeling for a space manipulator, adopts a rigid-flexible joint simulation modeling scheme, performs finite element flexible substitution of the key components of the manipulator transmission, the manipulator arm rods, and establishes the consideration of joint torsional stiffness and quality characteristics. The mechanical system model of the robot arm with frequency characteristics and load characteristics.
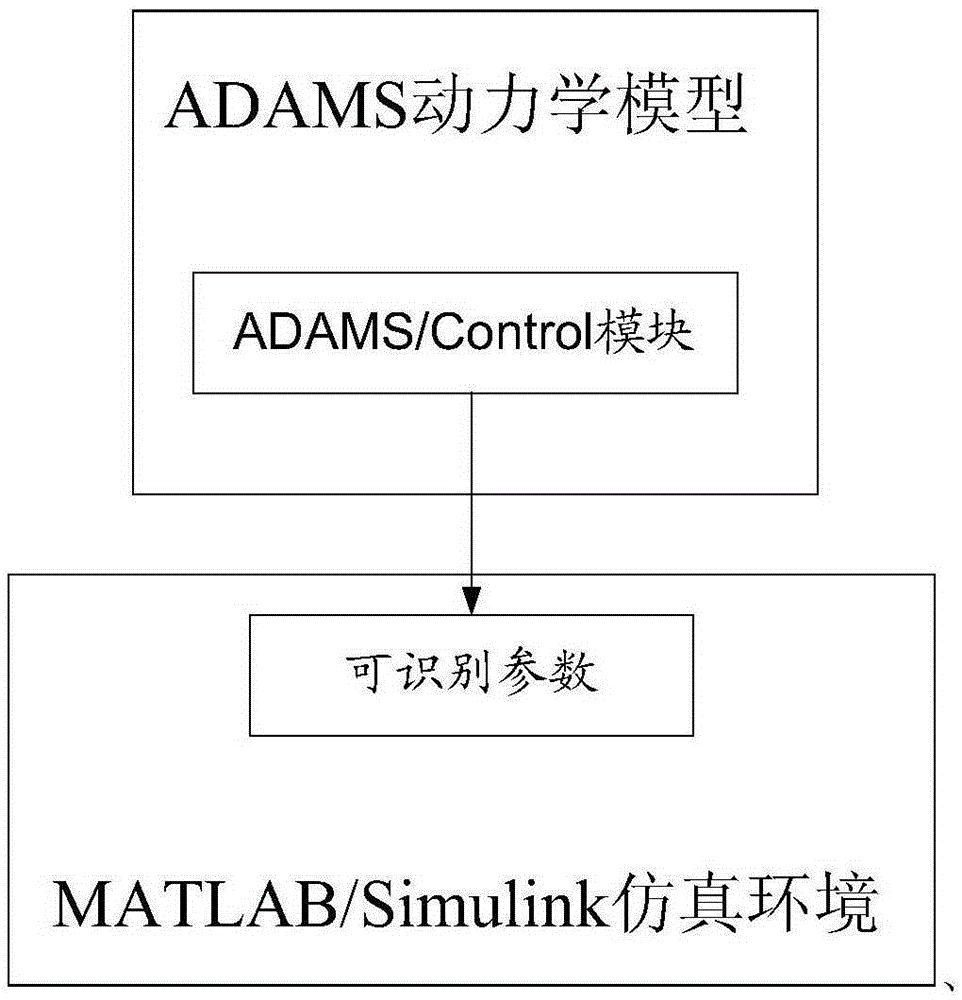
[0031] According to the kinematics and dynamics coupling model of the six-degree-of-freedom space manipulator and the base, the dynamic model of the space manipulator is established by ADAMS software. The establishment can be achieved through the following steps: ① Establish a three-dimensional model of the multi-joint robot through 3D modeling software, and define the rigid body, the local coordinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More