

Deviation rectification control method of nuclear waste intelligent bridge crane
A technology for bridge cranes and control methods, which is applied to traveling bridge cranes, hoists, and traveling mechanisms, etc., can solve the problems of large running deviation at both ends of the crane cart, excessive wear of wheel flanges, and increased maintenance costs, etc., to achieve The best running effect, high accuracy of deviation correction, and the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
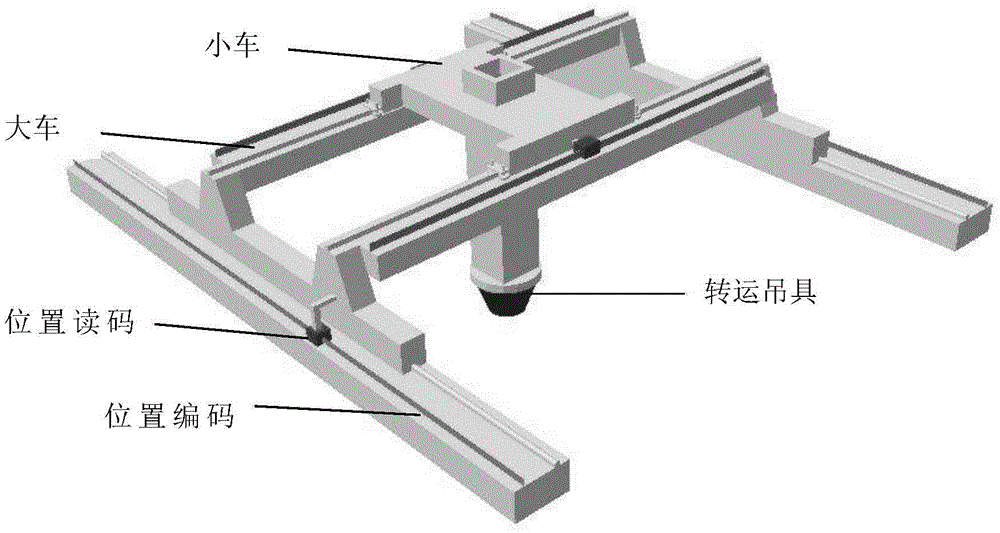
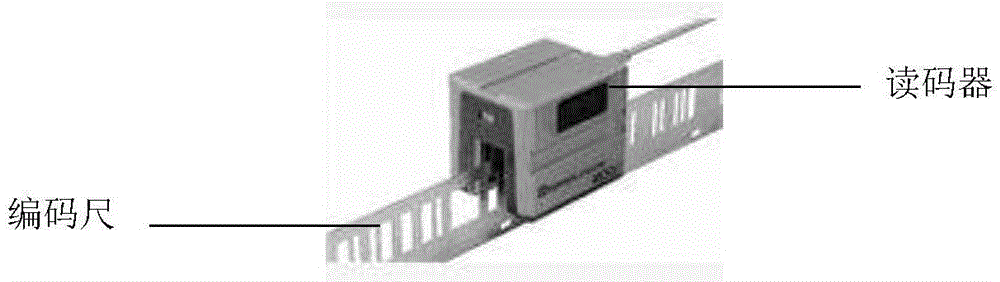
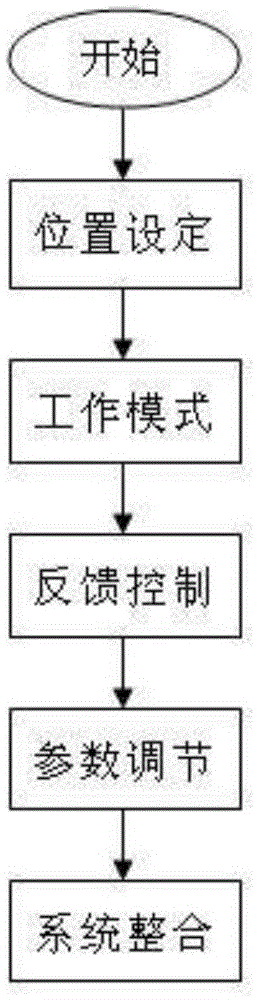
[0022] The basic idea of the present invention is: the bridge crane travels to deviate and needs to be corrected. The main factor of the deviation is rail gnawing, and the key to avoid rail gnawing is to correct the deviation of the crane cart to make the two ends of the cart walk synchronously. From the perspective of control strategy, if the non-master-slave mode is used to correct the deviation of the nuclear waste intelligent bridge crane, it will be due to the processing error of the mechanical structure at both ends of the cart, the error of the code ruler itself, the error of data transmission efficiency, and other uncertain factors. The accumulative error of the cart makes the walking state sometimes stable and sometimes oscillating violently when the cart is cyclically walking back and forth, and the deviation value is obviously not within a fixed range, and the fluctuation is too large. Consider changing the working mode of the deviation correction control strategy,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More