

Four-rotor agricultural remote control aircraft and control method thereof
A control method and technology of aircraft, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as difficulty in controlling the flight attitude of quadcopters, achieve good application prospects, enhance practical value, and reduce labor intensity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
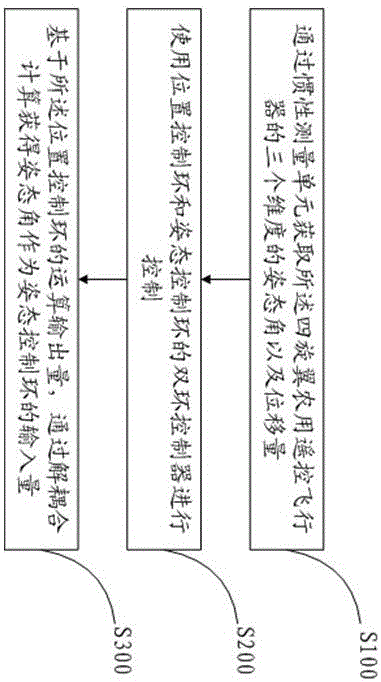
[0084] First, the angular velocity information in each dimension direction is acquired through the single-axis electronic gyro sensor. Then, the angular velocity information is integrated to obtain the angle rotated in the dimensional direction in each sampling interval. Finally, the next attitude angle is calculated using the rotation matrix and the previous attitude angle.
[0085] Using such an attitude angle solution method can well guarantee the attitude measurement performance.
[0086] Further, when the four-rotor agricultural remote-controlled aerial vehicle is flying at low speed or is static, the following method is adopted: the three-axis gravity acceleration sensor is used alone to obtain acceleration information in three dimensions. Then, after performing normalization processing on the acceleration information, an inverse triangular transformation is performed to obtain the attitude angle.
[0087] Preferably, the method further includes: performing data fusion...
example
[0110] In order to simplify the debugging process and facilitate the analysis of the debugging results, the host computer software can also be used for data collection, monitoring and analysis, and it can also function as a ground control station in an emergency. The NRF2401 module is used between the host computer and the flight controller, and a custom wireless communication protocol is used to exchange data and instructions with the flight controller.
[0111] The upper computer uses Microsoft Visual Studio 2010 integrated development environment as a development tool, and is realized by C# language coding.
[0112] The upper computer software realizes the recording and analysis of the flight data of the quadcopter, records the data of each sensor of the quadcopter, and can independently control and debug the motor speed. Capable of PID parameter setting and control channel simulation.
[0113] During the debugging process, the attitude of the aircraft is fixed so that onl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More