

Inertia online identification method and system of servo motor drive system
A servo motor and drive system technology, applied in control systems, control generators, vector control systems, etc., can solve problems such as weakening friction torque, application constraints, and result fluctuations, and achieve the effect of suppressing harmonics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] It should be noted that, in the case of no conflict, the following technical solutions and technical features can be combined with each other.
[0056] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
[0057] The current model reference adaptive identification algorithm usually adopts the MIT adaptive mode, which can realize the identification of the moment of inertia and viscous friction coefficient at the same time by using the method of adaptive law gradient descent. Therefore, its processing speed can only be applied to offline identification; and the identification accuracy of this method is related to the manual selection of adaptive gain, and its application is severely restricted.
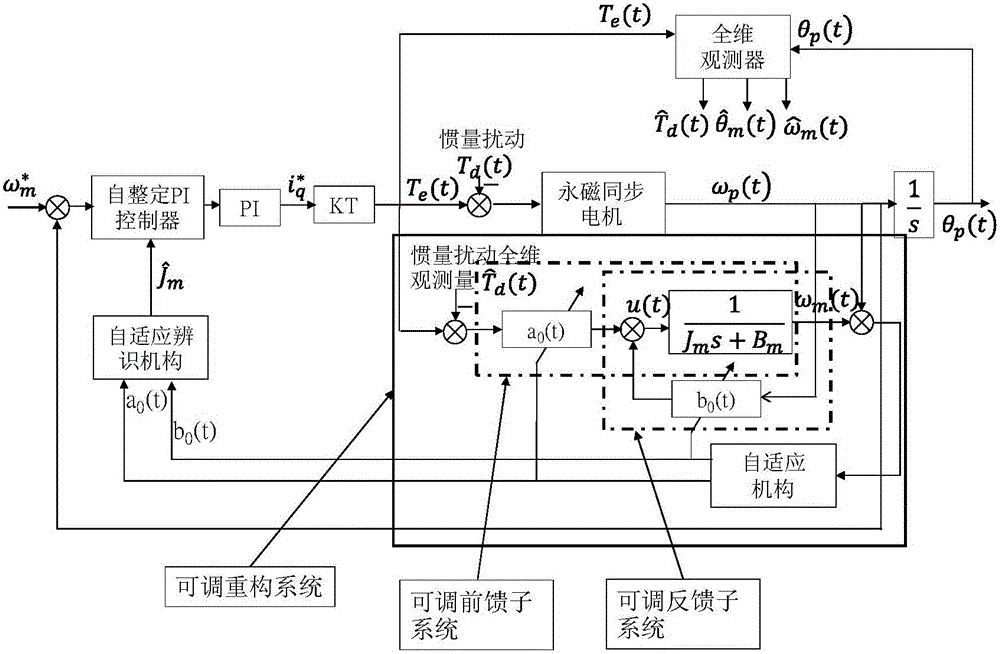
[0058] During the operation of the servo system, the load disturbance torque usually includes the load torque carried by the motor and the disturbance torque caused by the deviation between the moment of inert...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More