Initialization calibrating method for M-IMU human motion capture system
A technology of human body movement and calibration method, applied in the field of initialization calibration, which can solve the problems of complex operation and low precision, and achieve the effect of simple calibration method, high calibration cost and guaranteed reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0029] Specific embodiment one: a kind of initialization calibration method for M-IMU human motion capture system following steps:
[0030] The articulated multi-rigid body model is widely used in human motion analysis and biomechanics research. This model regards each limb of the human body as a rigid body, ignores the translational motion of the human joints, and only considers its rotational motion. The simplified mannequin consists of head, torso, pelvis, upper and lower limbs.
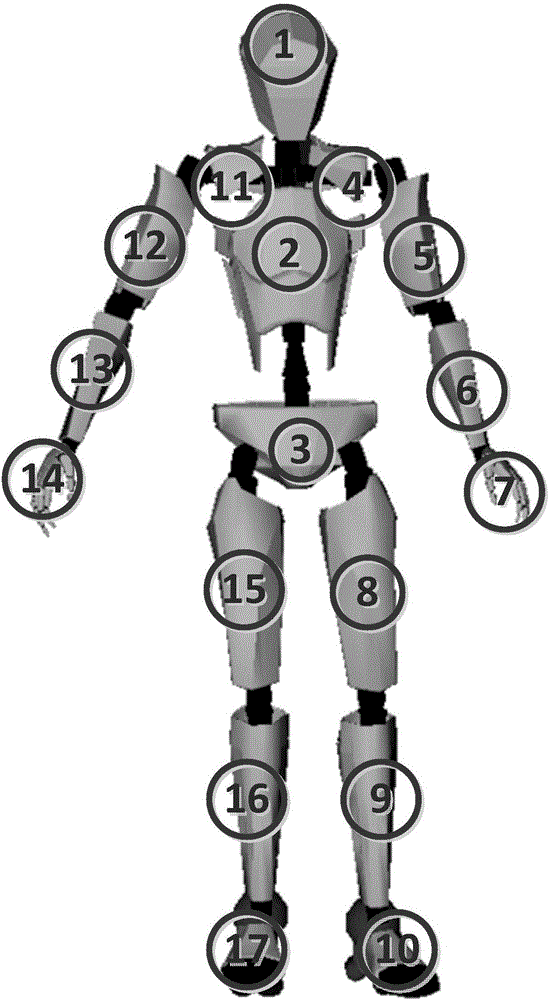
[0031] Step 1: Divide the human limbs into 17 parts and number them according to the human kinematics model and human anatomy, such as figure 1 shown, and establish a human body coordinate system for each part of the human body and the corresponding sensor coordinate system Simultaneously establish a reference coordinate system where i=1,2,3,...,17;
[0032] Step 2: Fix the M-IMU sensor on 17 corresponding limbs;
[0033] Step 3: Set three calibration postures, namely calibration posture 1...
specific Embodiment approach 2
[0039] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, a human body coordinate system is established for each part of the human body and the corresponding sensor coordinate system Simultaneously establish a reference coordinate system Specifically:
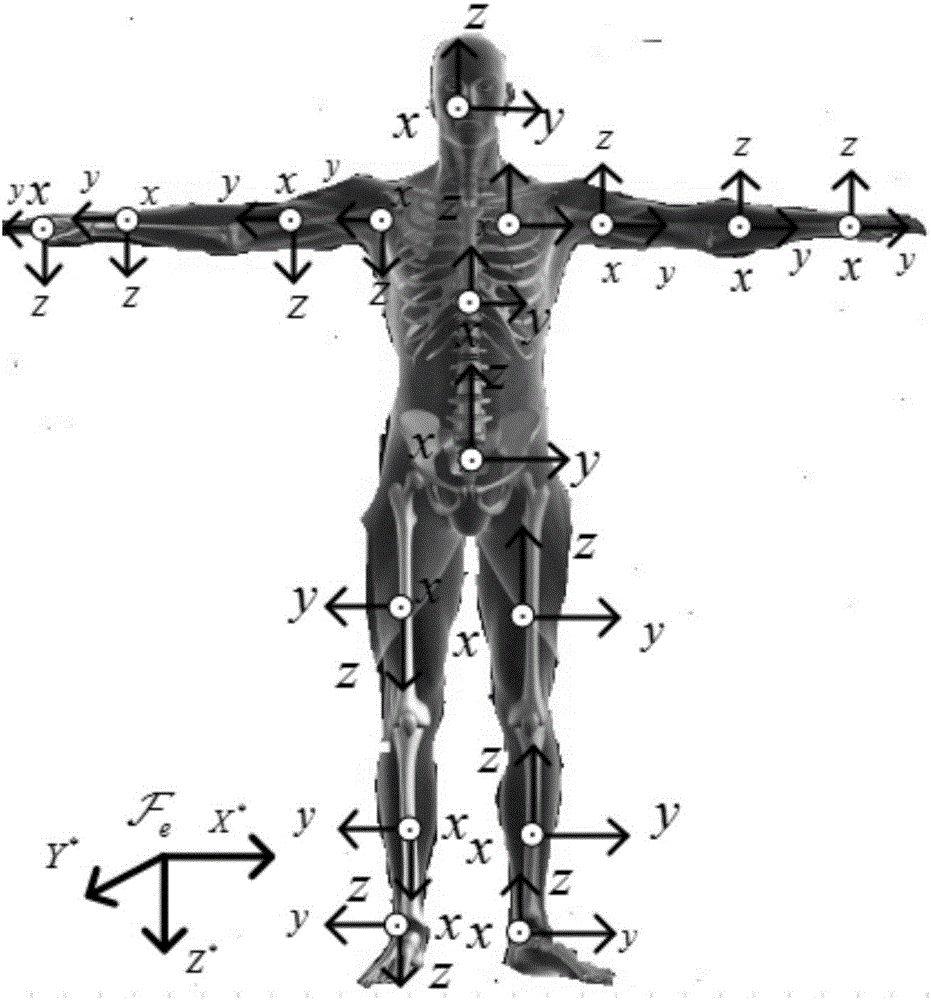
[0040] According to the human kinematics model, the human body is divided into 17 parts and numbered; the human body coordinate system is defined in combination with the human body's movement shape. The human body coordinate system is established on the left lower limb, the x-axis points to the front of the body, the y-axis points to the left side of the body, and the z-axis is vertically upward; The x-axis of the human body coordinate system of the upper and right lower limbs points to the front of the body, the y-axis points to the right side of the body, and the z-axis is vertically downward; the reference coordinate system is the earth coordinate system, the X...
specific Embodiment approach 3
[0042] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the calibration posture 1, calibration posture 2 and calibration posture 3 in the step three are specifically:
[0043] Calibration posture 1 is to keep the body and lower limbs upright, feet together, arms drooping naturally, palms facing the inside of the body;
[0044] Calibration posture 2 is to keep the body and lower limbs upright, feet together, hands stretched to the sides of the body, palms facing down;
[0045] Calibration posture 3 is to keep the body and lower limbs upright, feet together, arms stretched forward to shoulder level, palms facing down.
[0046] The user performs three calibration postures in sequence, and holds each calibration posture for ten seconds. In each posture, the sensor collects data at a sampling frequency of 10 Hz. Three calibration poses such as image 3 , Figure 4 and Figure 5 shown.
[0047] Other steps and parameters a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More