

Test prototype automobile of electric wheel driving automobile and driving stability control method
A technology for electric vehicles and electric wheels, applied in electric vehicles, control drives, control devices, etc., can solve the problems of reducing the power of the vehicle, the driving force of the left and right wheels is different, and the control results cannot be obtained.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
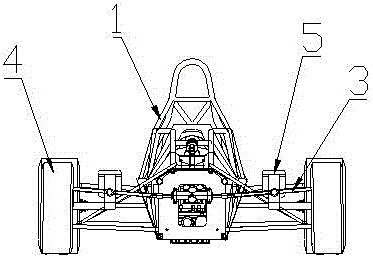
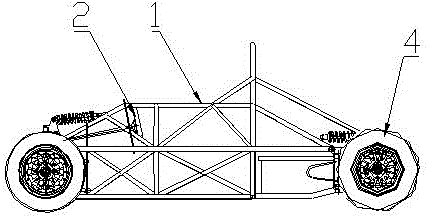
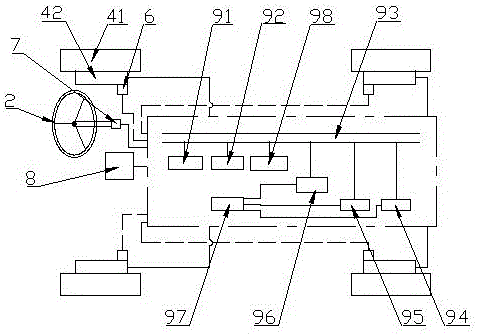
[0049] Example: see Figure 1 to Figure 4 , a test prototype of an electric wheel drive vehicle, comprising a body 1, a steering wheel 2, an independent suspension 3 and an electric wheel assembly 4. There are four electric wheel assemblies, which include wheels 41, hub motors 42, and electromagnetic brakes. The four electric wheel assemblies 4 are respectively connected to the vehicle body 1 through an independent suspension 3, wherein the independent suspension 3 is installed There is a steering motor 5, and the electric wheel assembly 4 is connected with the steering motor 5 through a steering shaft. The vehicle body 1 is provided with a wheel speed sensor 6, a steering wheel angle sensor 7, a gyroscope 8 and a control system. There are four wheel speed sensors 6, which are installed on the four electric wheel assemblies 4 respectively.
[0050] The control system includes a sensor signal processor 91, a road surface state estimator 92, a CAN bus 93, an electronic differen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More