

Multi-shaft AC servo motor control device
A technology of AC servo motor and control device, which is applied in the direction of AC motor control, motor generator control, control of electromechanical transmission, etc., and can solve problems that have not been considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1)
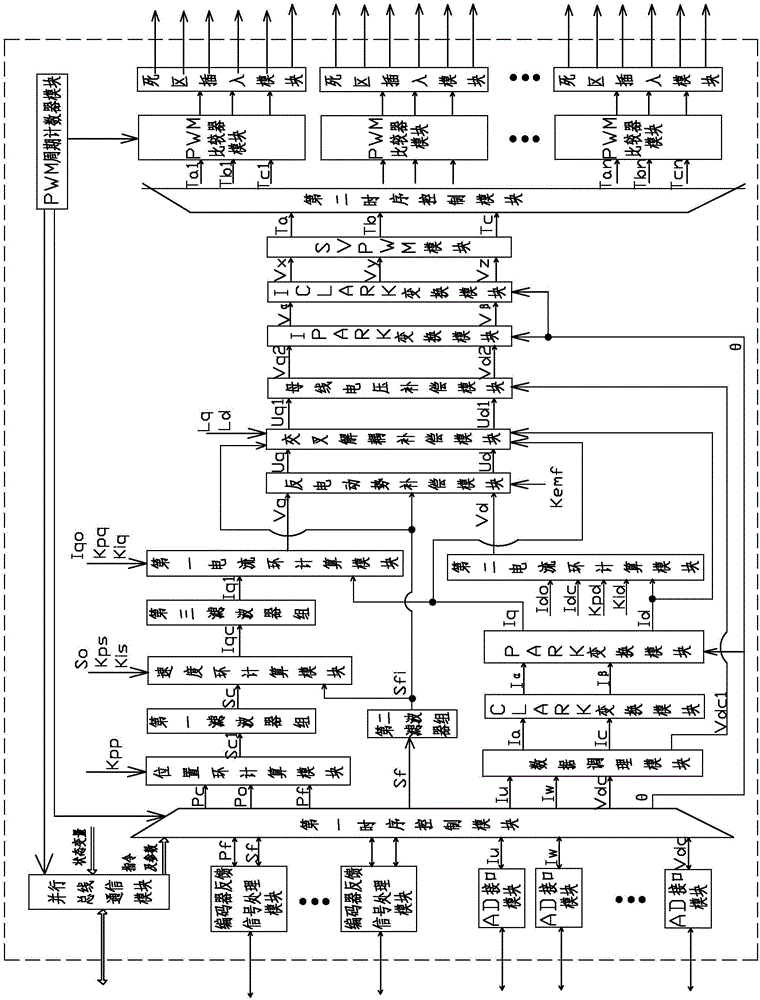
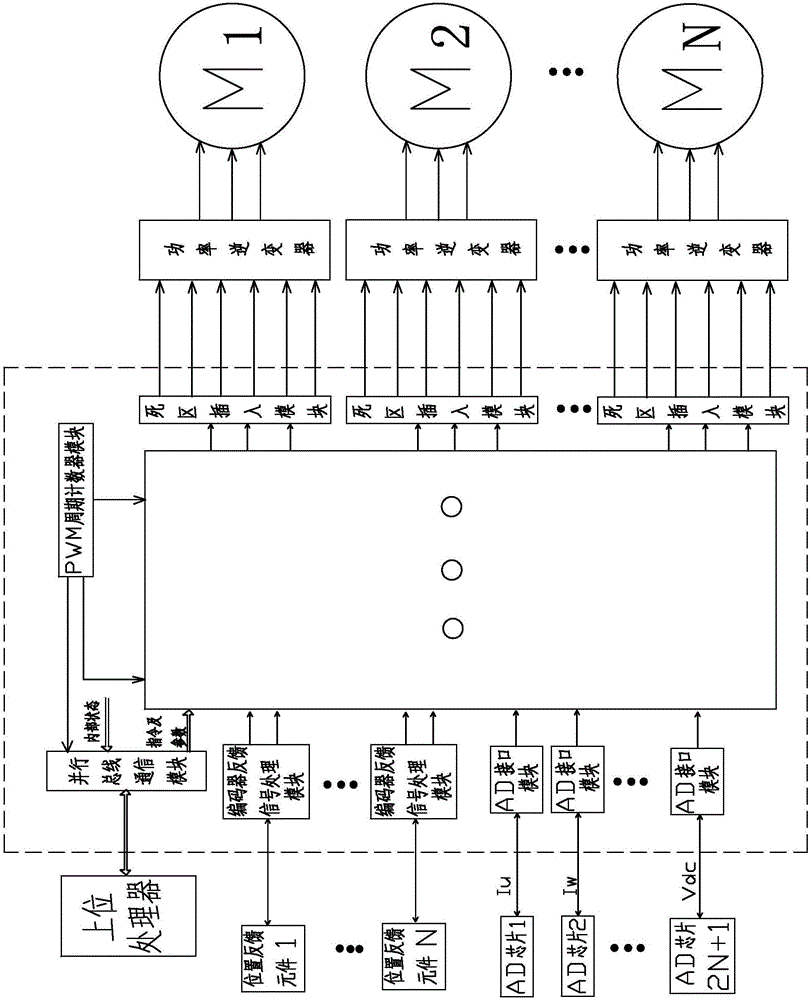
[0055] See figure 1 and see figure 2 , the multi-axis AC servo motor control device of this embodiment is realized based on a digital logic circuit, and mainly consists of a parallel bus communication module, a PWM cycle counter module, an encoder feedback signal processing module, an AD interface module, a first timing control module, a position Loop calculation module, first filter bank, second filter bank, speed loop calculation module, third filter bank, data conditioning module, CLARK transformation module, PARK transformation module, first current loop calculation module, second current loop It is composed of calculation module, back EMF compensation module, cross decoupling compensation module, bus voltage compensation module, IPARK transformation module, ICLARK transformation module, SVPWM module, second timing control module, PWM comparator module and dead zone insertion module.
[0056] The parallel bus communication module is used to communicate with the supportin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More