

Gait rehabilitation robot for implementing walking foot posture
A technology for rehabilitation robots and parts, which is applied in the direction of devices to help people walk, passive exercise equipment, physical therapy, etc. It can solve problems such as failure to achieve foot posture, achieve release of constraints, better comfort, and reduce manufacturing costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
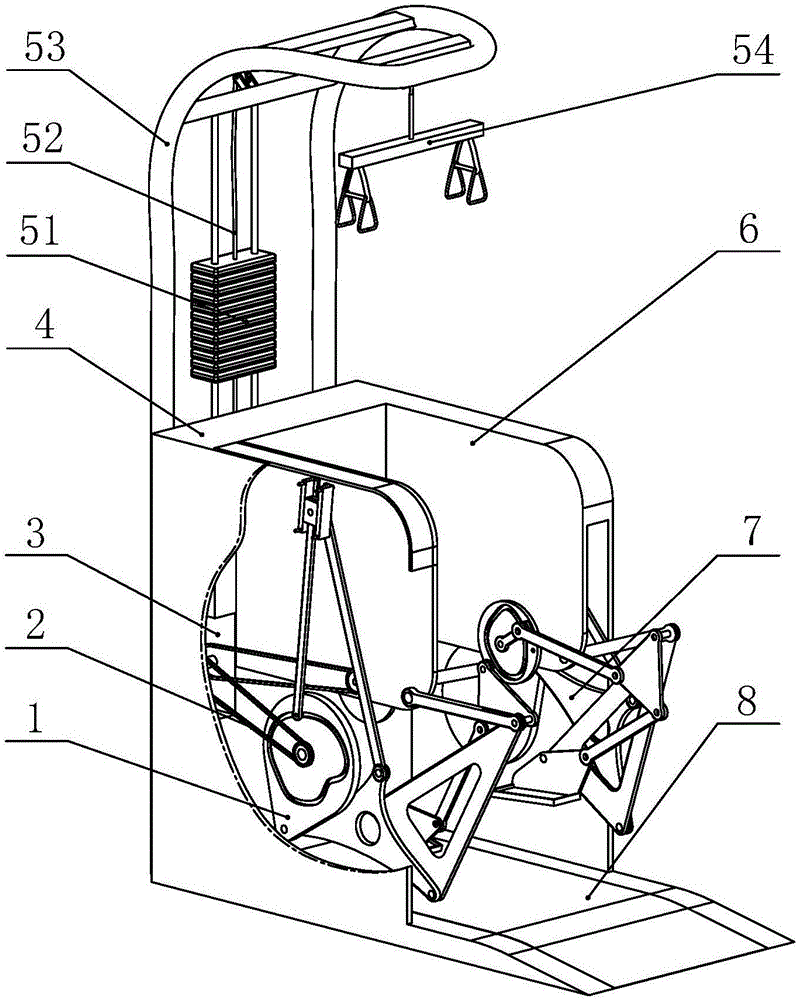
[0023] Such as figure 1 As shown, a kind of gait rehabilitation robot that the present invention proposes to realize the walking foot posture includes a frame 4, a power unit 3, and a transmission device 2, the upper end of the frame 4 is a suspension device, and the lower end of the frame 4 is There are two left and right sets of identical end effectors 1 and 7 connected to the transmission device 2, a base 8 is provided at the bottom of the frame 4; the power device 3 is installed on the frame 4, Usually, for the sake of safety, a safety shield is installed on the frame 4, and the two sets of end effectors 1, 7 are simultaneously driven through the transmission device 2; the motor used in the power device 3 is a constant-speed motor. Described suspension device comprises the support 53 that is fixed on described f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More