

Humanoid robot based on leap motion of Kinect
A somatosensory control and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems that robots cannot move quickly, fall down, and the stability is not good, and achieve rich functions, strong visual impact, and flexible movement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In conjunction with the drawings, the invention is described as follows
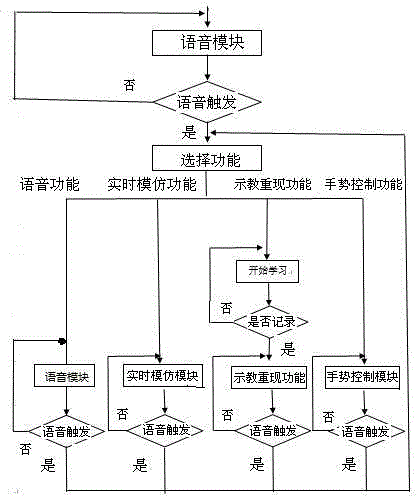
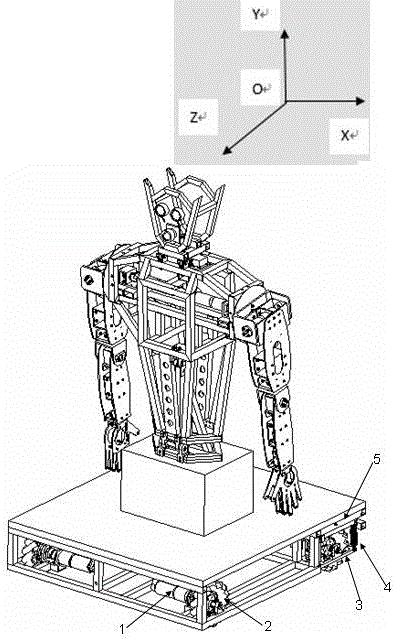
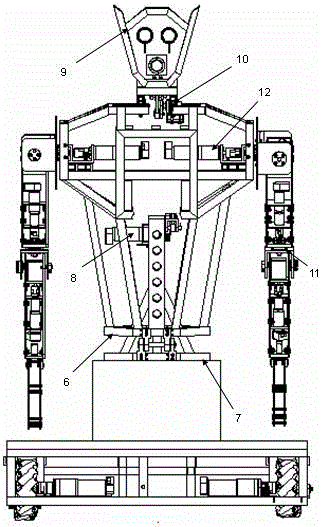
[0027] Such as figure 1 with figure 2 As shown, the robot of the present invention is composed of three parts: Kinect perception and upper computer processing part, STM32 lower computer part and human mechanical skeleton part;
[0028] The Kinect perception and host computer processing part includes a Kinect depth sensor module, a four-element microphone array voice recognition module and a personal PC;
[0029] The Kinect depth sensor module is used to collect human bone information; the voice recognition module is used to collect voice commands for function switching; the personal PC acts as an intermediate information bridge, passing the bone information and voice information obtained by the Kinect depth sensor module The processing is then sent to the STM32 lower computer part through the local area network, and the STM32 lower computer completes the corresponding functions;
[0030] The STM32 lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More