

Quadrotor unmanned plane control method based on fuzzy expansion state observer and adaptive sliding formwork
An expansion state observation, quadrotor UAV technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problem that the gain of the sliding mode controller is difficult to obtain accurately, the state and disturbance are unmeasurable, and the expansion state Observer parameters are difficult to tune and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with the accompanying drawings.
[0088] Referring to Figure 1- Figure 9 , a quadrotor UAV control method based on fuzzy extended state observer and adaptive sliding mode, including the following steps:
[0089] Step 1: Establish the system motion equation shown in formula (1);
[0090]
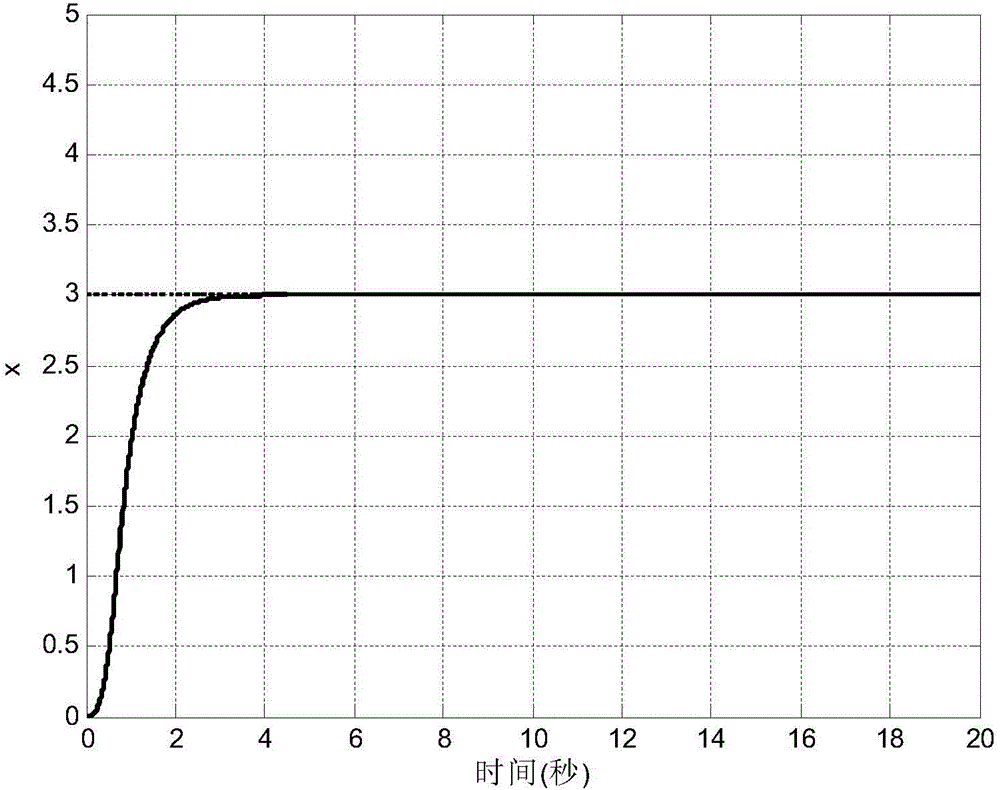
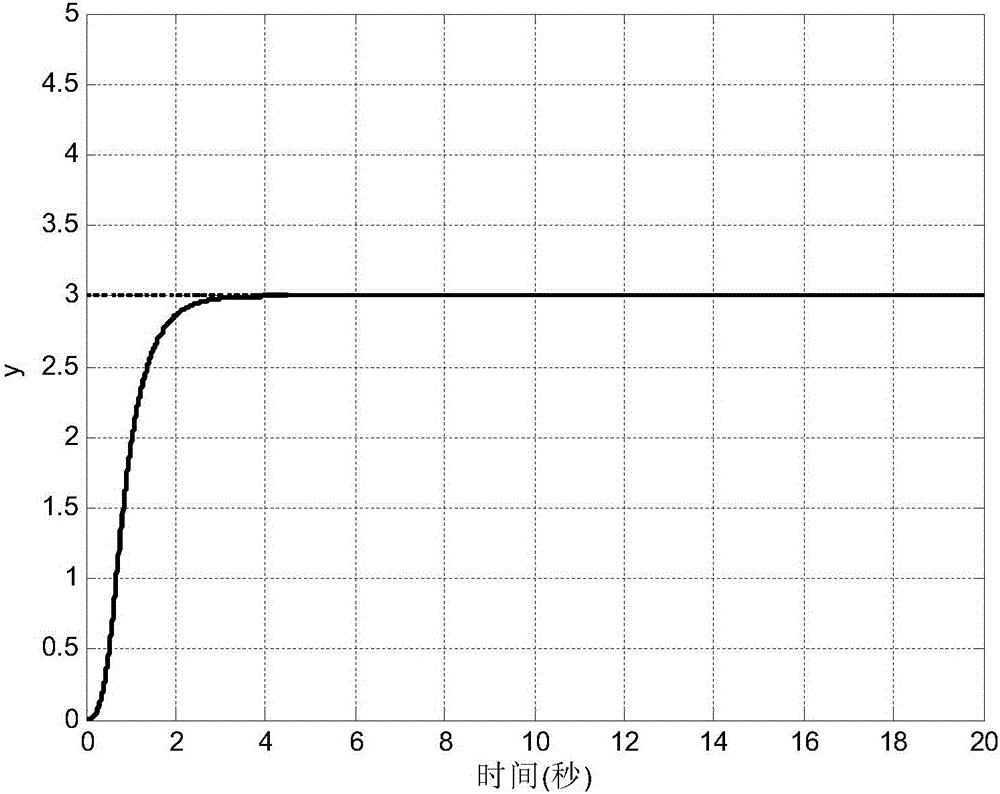
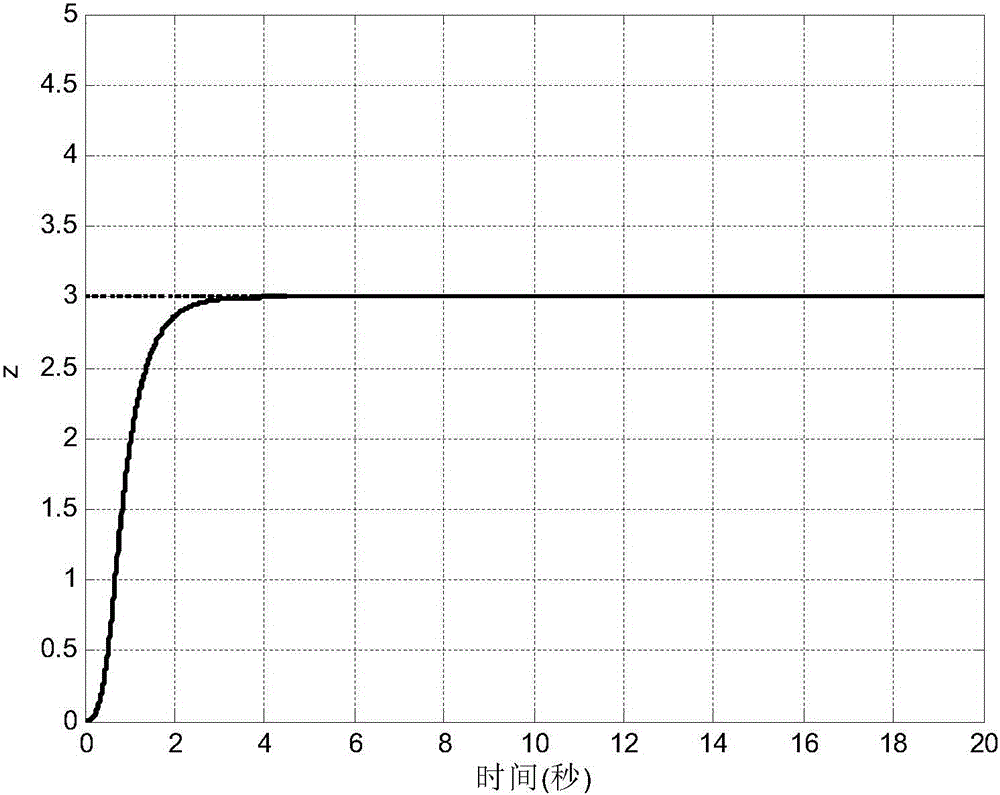
[0091] Among them, x, y, and z are the coordinates of the UAV relative to the origin in the ground coordinate system. φ, θ, and ψ represent the pitch angle, roll angle, and yaw angle of the UAV, respectively. u 1 Indicates the resultant external force acting on the quadrotor UAV. p is the pitch angular velocity of the UAV, is the pitch angular acceleration, q is the roll angular velocity of the UAV, is the roll angular acceleration, r is the yaw angular velocity of the UAV, is the yaw angular acceleration, m is the mass of the UAV, I x , I y , I z Respectively, the inertia tensor on the z, y, and z axes,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More