

Robot safety control method and system based on dynamical system
A control method and technology of safety control, applied in passive exercise equipment, program-controlled manipulators, manipulators, etc., can solve the problems such as the difficulty in reflecting the patient's subjective movement ability and the difficulty in reflecting the treatment effect, so as to help lower extremity rehabilitation and improve lower extremity rehabilitation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
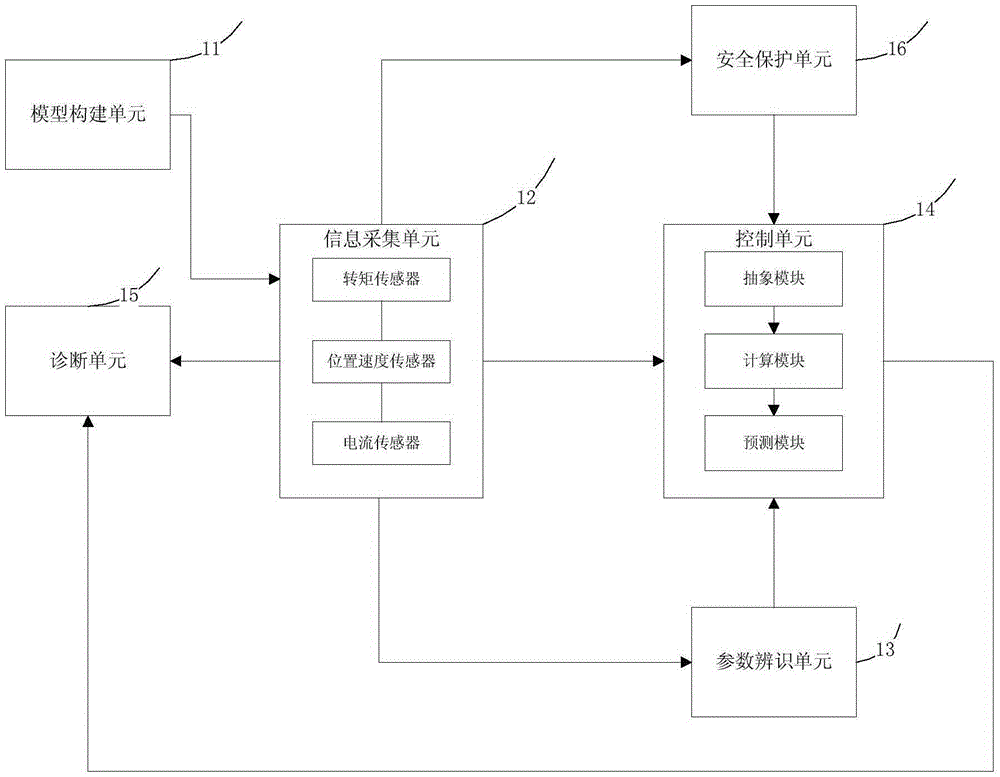
[0028] See figure 1 , figure 1 It is a schematic structural diagram of a robot control system based on a dynamics system provided by an embodiment of the present invention. Such as figure 1 As shown, the robot control system 10 based on the dynamics system of the present invention includes a model construction unit 11, an information acquisition unit 12, a parameter identification unit 13, a control unit 14, a diagnosis unit 15 and a safety protection unit 16.
[0029] The model construction unit 11 is used to construct a robot dynamics model according to the joint structure of the robot.
[0030] The information collection unit 12 is used to collect signals required by the entire lower limb rehabilitation robot (hereinafter referred to as "robot"). The belonging information collection unit 12 also includes a torque sensor 121, a position and speed sensor 122, and a current sensor 123. The torque sensor 121 is used to collect the torque signal of the joint; the position and speed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More