

Cooperative control method of position and force signals of electro-hydraulic servo system
An electro-hydraulic servo system and cooperative control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as being easily affected by the external environment and complicated processes, and improve self-learning ability and expression Ability of knowledge, effect of increasing restraint, effect of increasing load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Step 1. Design the Discrete PID Controller
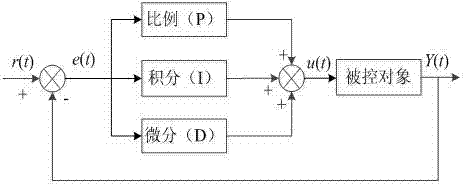
[0053] In this paper, the discrete PID controller is used for control in the position control part. PID control refers to the linear combination of proportional, integral and differential control to obtain a controller. It is suitable for control objects that cannot fully grasp the system structural parameters or cannot obtain accurate mathematical models. It is the most widely used in engineering practice. It is characterized by simple structure, good stability and reliable operation; the structure of PID controller is as follows: figure 1 shown.
[0054] The theoretical structure of the discrete PID controller is as follows:
[0055]
[0056] In the formula, T is the sampling period. K P is a proportionality factor. K I is the integral coefficient. K D differential coefficient. T I is the integration time constant. T D is the differential time constant. No. k The relationship between the sampling period de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More