

Human simulation dexterous hand based on shape memory alloy (SMA) flexible body intelligent digital composite structures
A composite structure, memory alloy technology, applied in the field of human-like dexterous hands, can solve the problems of poor movement flexibility and precision, unsuitable for long-distance operation, complex position control, etc., to ensure stability and safety, and improve movement ability. And the effect of the adaptation range and parameters are precisely controllable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
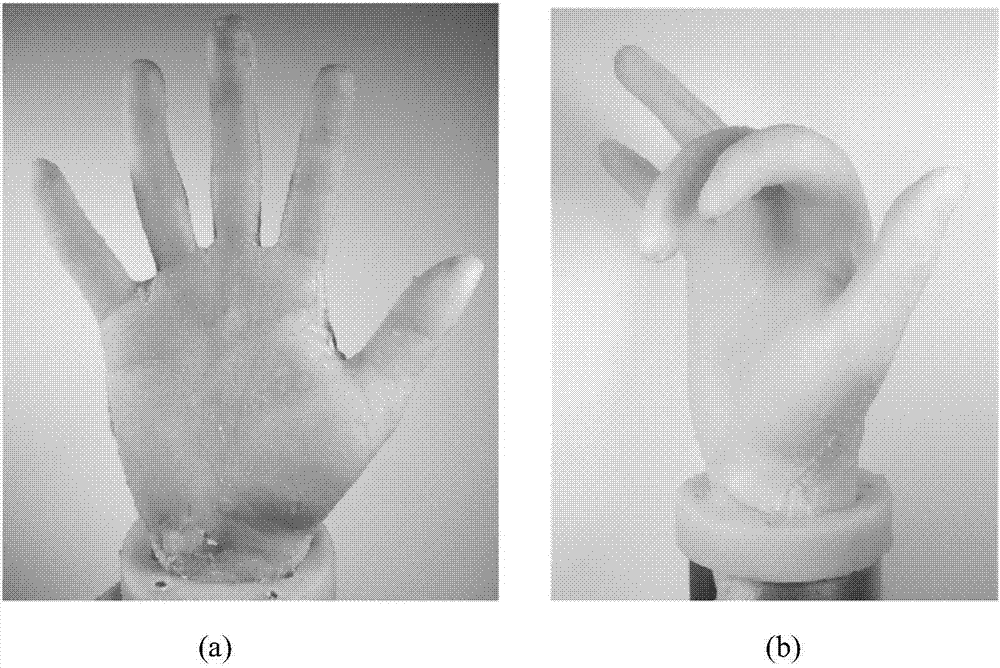
[0038] figure 1 It is the humanoid dexterous hand based on the SMA flexible body intelligent digital composite structure provided by the present invention. figure 1 (a) is the front view of the humanoid dexterous hand, figure 1 (b) is a curved side view of the humanoid dexterous hand. The shape of the humanoid dexterous hand is consistent with that of a human hand; the humanoid dexterous hand is made by mold casting process, and the SMA-flexible intelligent digital composite structure imitating five fingers is casted. The outer material of the humanoid dexterous hand is a flexible wrapping material. The mold of the human dexterous hand is made based on the human hand, and two technologies of 3D scanning and model method can be used; the 3D scanning is based on 3D scanning technology to scan out the shape and size of the human hand, and the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More