

Method for planning route of unmanned ship based on SVM algorithm
A path planning and unmanned ship technology, applied in calculation, navigation calculation tools, prediction, etc., can solve the problems of high path optimization accuracy, affecting the motion path accuracy, and large path error, so as to solve the problem that the positioning accuracy is not high enough and the solution is stable Low sex, reduce the effect of interference factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
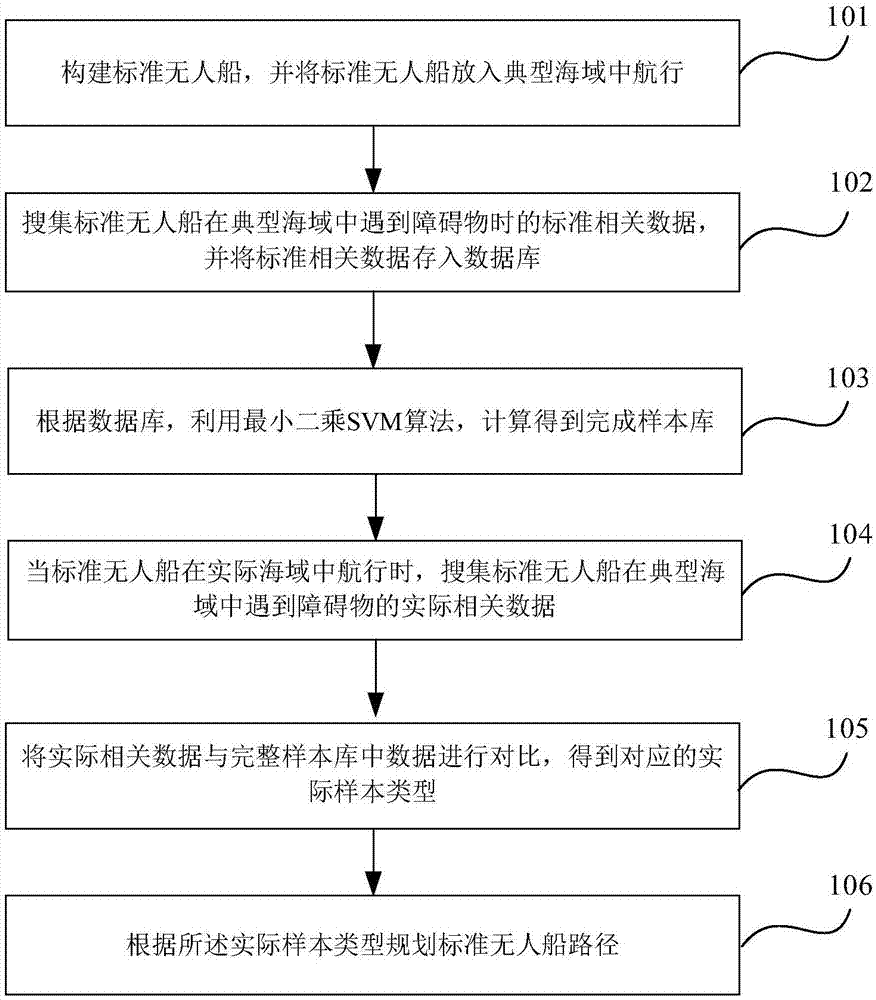
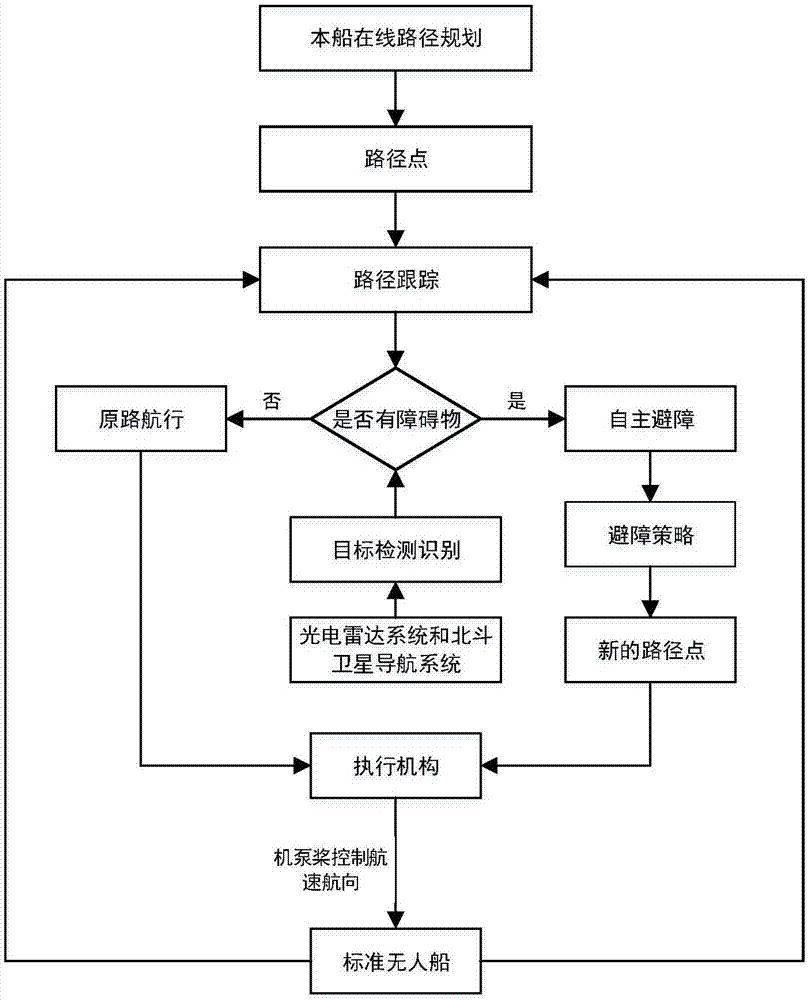
[0067] Such as Figure 1 to Figure 3 Shown, the unmanned ship path planning method based on SVM algorithm described in the present invention, comprises the following steps:
[0068] 101. Construct a standard unmanned ship and place the standard unmanned ship in typical sea areas;
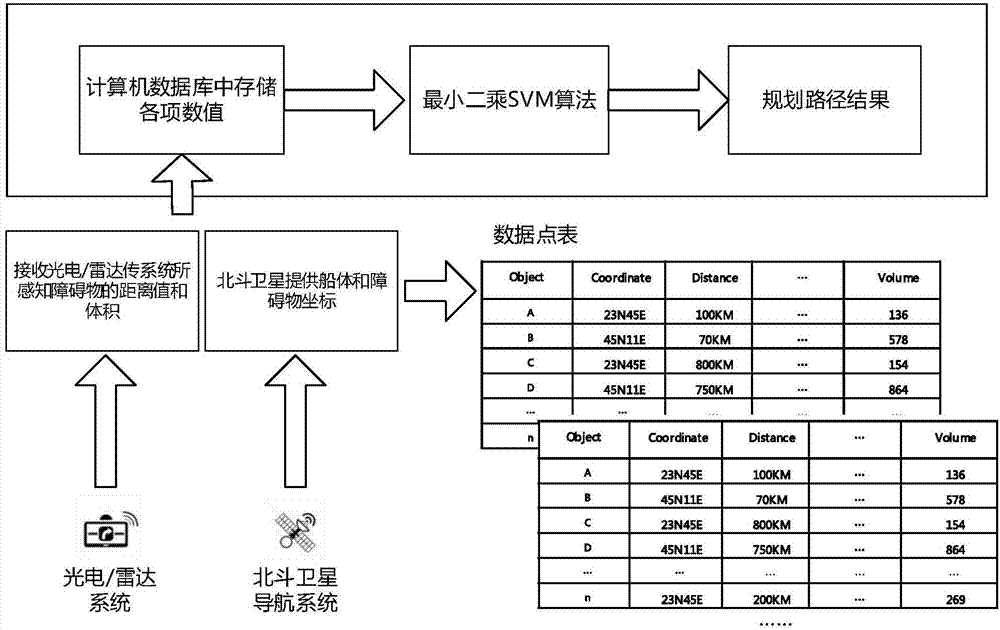
[0069] The photoelectric / radar system is installed on the standard unmanned ship, and the photoelectric / radar system is used to identify the distance S between the encountered obstacle and the standard unmanned ship and the volume D of the obstacle;
[0070] The calculation formula of the distance S between the obstacle and the standard unmanned ship is:
[0071]
[0072] Among them, C is the speed of light in vacuum, f is the counting fre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More