

ROS-based intelligent wheelchair with autonomous navigation function
An autonomous navigation and wheelchair technology, applied in the field of robotics, can solve problems such as single functions, and achieve the effects of convenient remote control, high real-time performance, and collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
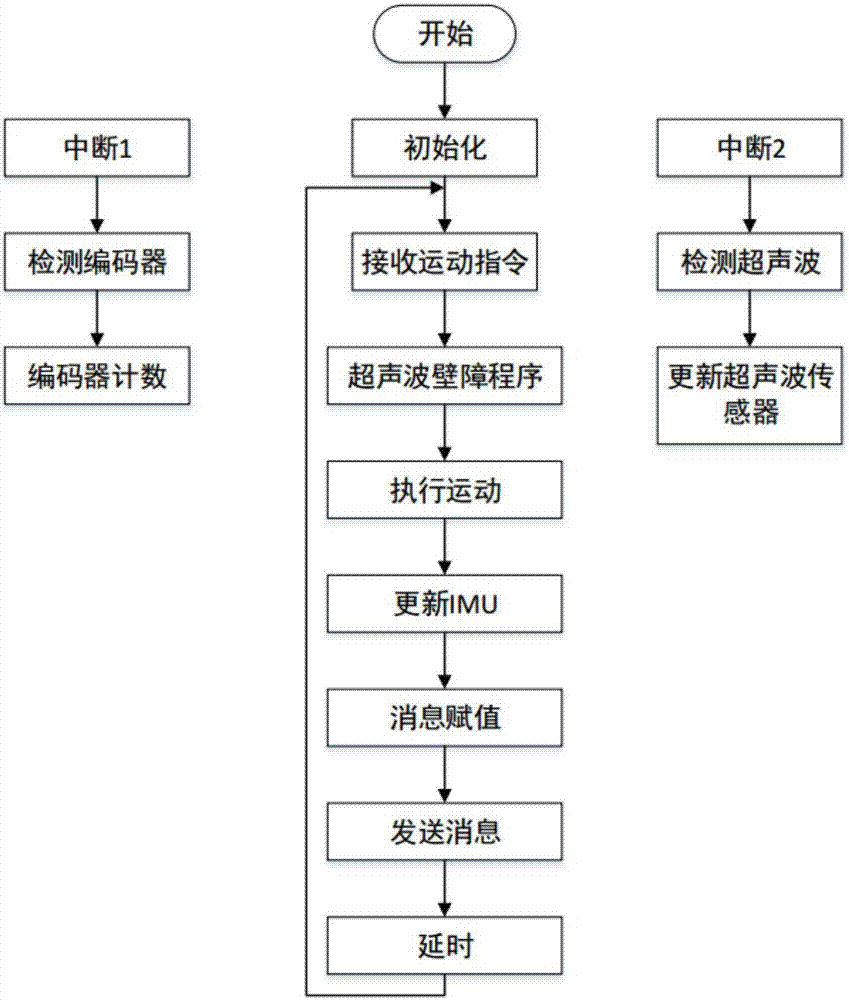
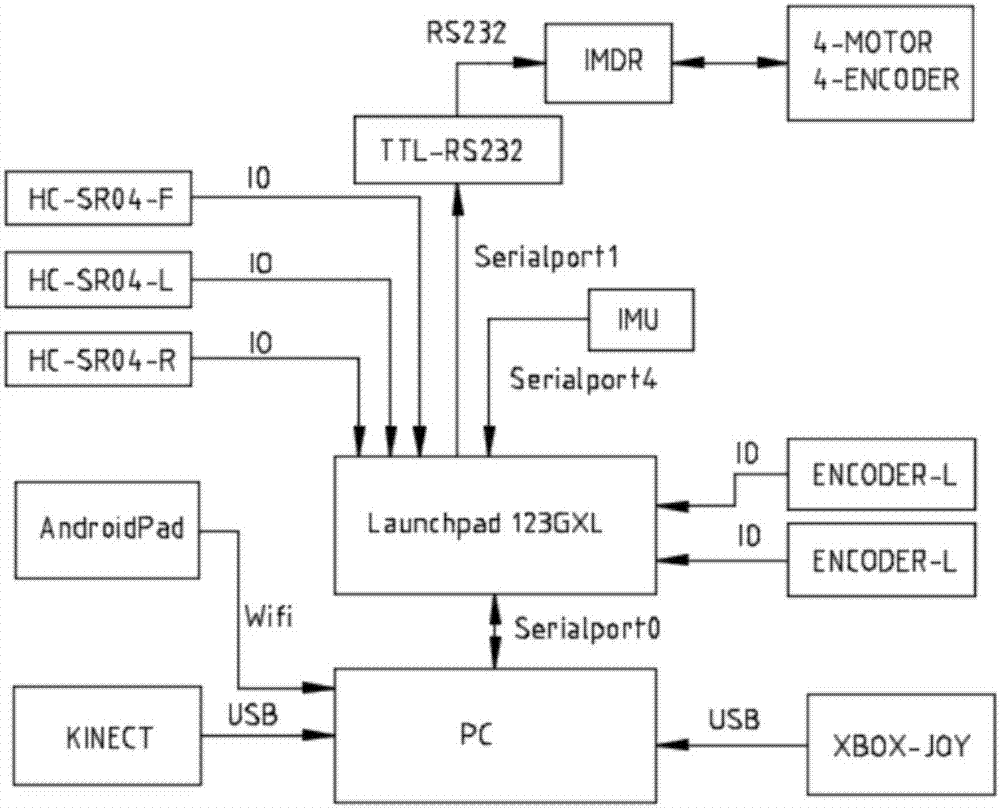
[0021] The ROS-based robot autonomous navigation system includes three parts: a single-chip lower computer system, a ROS upper computer system and a robot hardware platform.
[0022] The lower computer system part of the single-chip microcomputer includes modules such as a single-chip microcomputer, an encoder, an ultrasonic distance sensor, an accelerometer gyroscope, an electronic compass, a motor, and a drive.
[0023] The microcontroller is connected to the industrial control host through the USB serial port, and the robot hardware platform and the microcontroller are connected through the RS-232 serial port. The download protocol adopts the standard speed packet protocol geometry_msgs / Twist, and the upload protocol is a custom protocol, including mileage information. Gyro encoder data information, electronic compass data information, ultrasonic distance information, battery power information, operating status and other information.
[0024] The MCU is connected to the gyr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More