

A visual positioning system and positioning method for quick change of manipulator tools in nuclear environment
A technology of visual positioning and positioning methods, which is applied in image analysis, instruments, calculations, etc., and can solve problems such as unsatisfactory multi-functionality, uncertain working posture, and tool damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
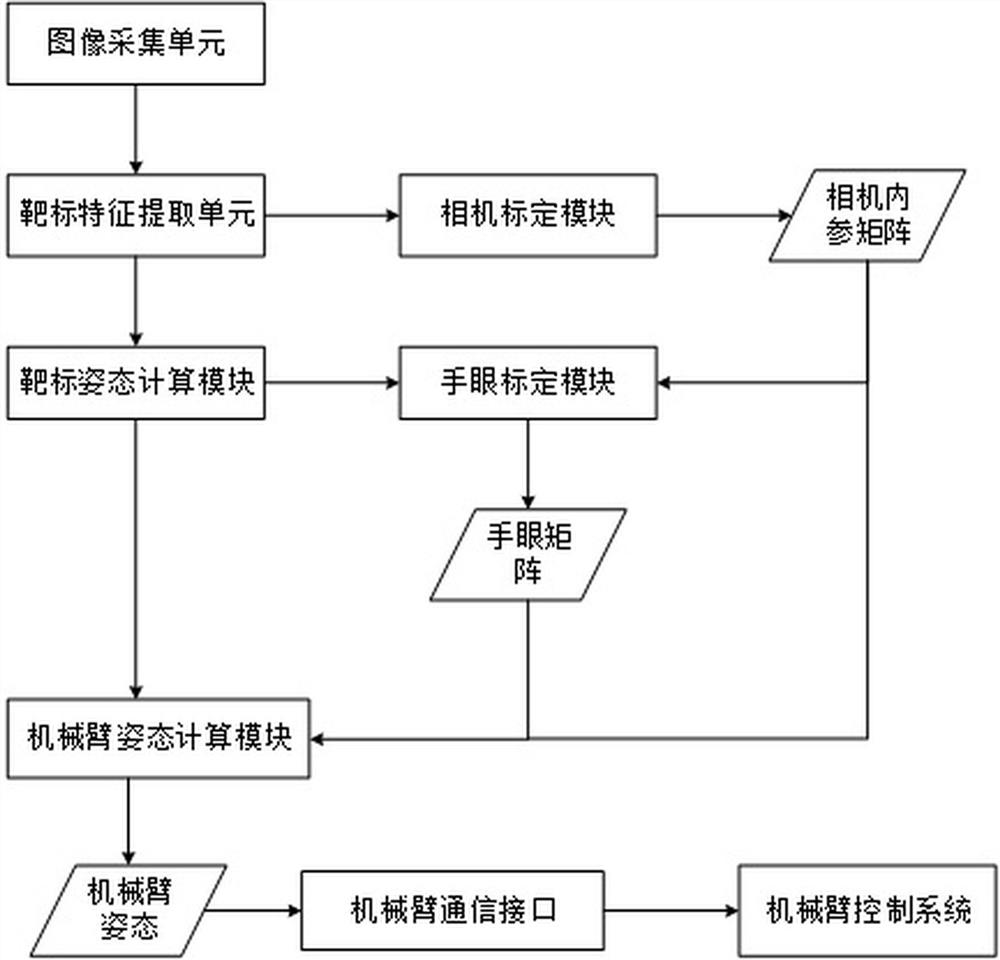
[0077] A visual positioning system for manipulator tool quick change in a nuclear environment, including an image acquisition unit, a target feature extraction unit, a target pose calculation module, a manipulator pose calculation module, and a manipulator control system that are sequentially connected by communication, and the target feature extraction unit It is also communicated with the camera calibration module, and the target pose calculation module is also connected with the hand-eye calibration module. The camera calibration module processes the feature data extracted by the target feature extraction unit through its camera internal reference matrix and sends the processing results to the hand-eye calibration module. The hand-eye calibration module combines the processing results of the camera internal reference matrix and the calculation results of the target pose calculation module for data processing and sends the processing results to the manipulator pose calculation...
Embodiment 2
[0080] A visual positioning system for manipulator tool quick change in a nuclear environment, including an image acquisition unit, a target feature extraction unit, a target pose calculation module, a manipulator pose calculation module, and a manipulator control system that are sequentially connected by communication, and the target feature extraction unit It is also communicated with the camera calibration module, and the target pose calculation module is also connected with the hand-eye calibration module. The camera calibration module processes the feature data extracted by the target feature extraction unit through its camera internal reference matrix and sends the processing results to the hand-eye calibration module. The hand-eye calibration module combines the processing results of the camera internal reference matrix and the calculation results of the target pose calculation module for data processing and sends the processing results to the manipulator attitude calcula...
Embodiment 3
[0083] Such as Figure 1 to Figure 6 A positioning method for a tool quick change visual positioning system of a manipulator in a nuclear environment, comprising the following steps:
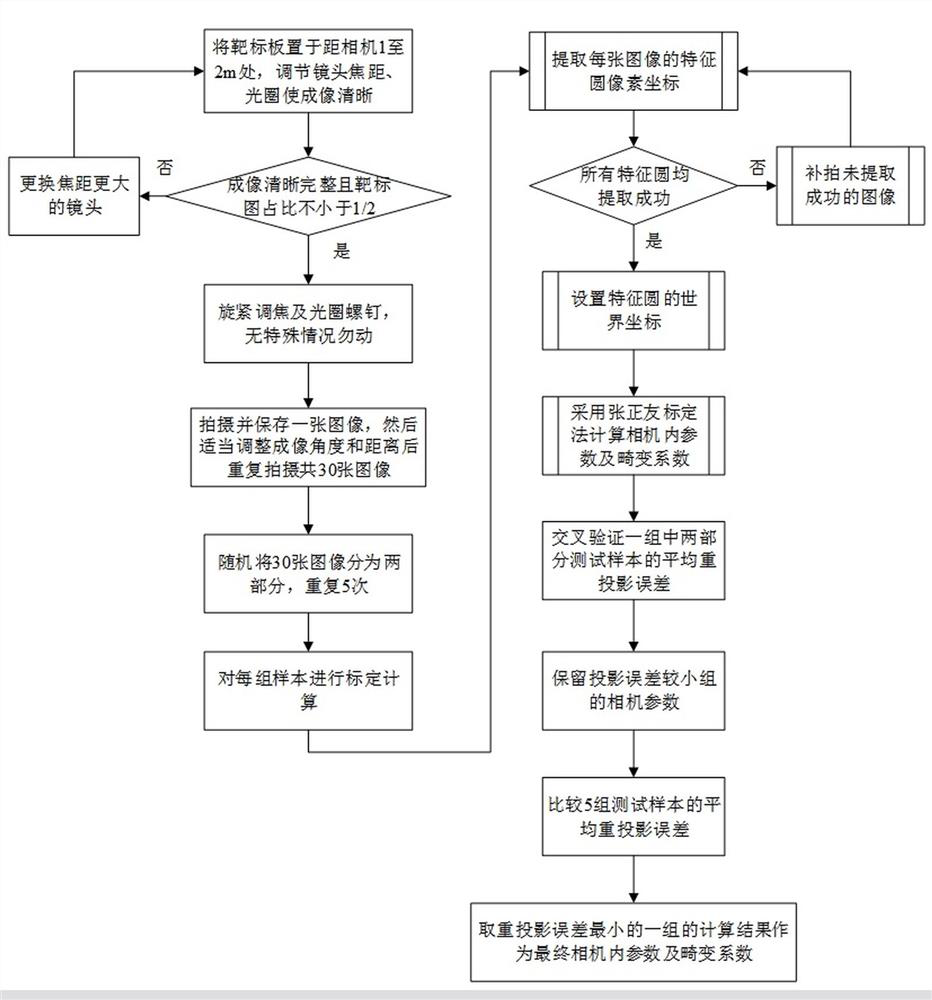
[0084] Camera calibration step, adjust the focal length and aperture of the camera until the image is clear, take a set of target images from different angles and heights, so that the target imaging covers 50% to 75% of the target image frame, and randomly divide a set of target images into two Use two groups of target images to calculate the internal parameters and distortion coefficients of the camera using the "Zhang Zhengyou calibration method" and alternately re-project to obtain the re-projection error, and keep the camera parameters calculated by the group with smaller errors;
[0085]The hand-eye calibration step of the robotic arm is to install the calibrated camera on the end bracket of the robotic arm, move the robotic arm above the target, and make the target image complete and clear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More