

Method for designing observation type unmanned remote control diving instrument
A technology of remote control submersible and design method, applied in underwater operation equipment, instruments, calculation and other directions, can solve the problems of unreasonable structural layout, poor structural stability, poor heat dissipation performance, etc., to save fixing materials and installation space, heat dissipation The effect of strong performance and strong structural stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
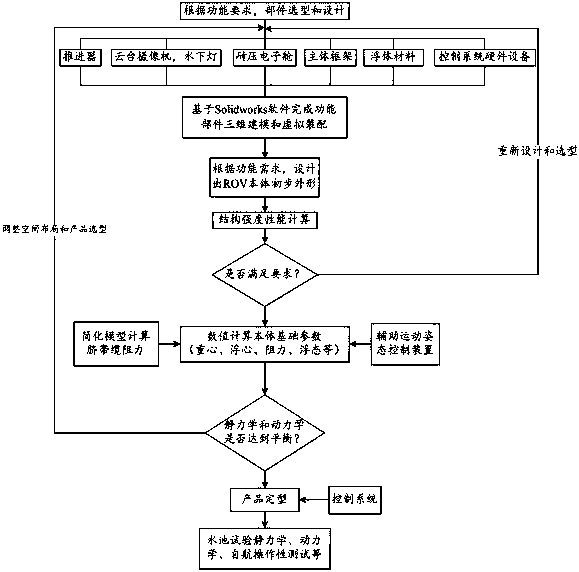
[0048] The design method of the observation type unmanned remote control submersible of this embodiment, the observation type unmanned remote control submersible comprises a frame module, a shell module, a pressure-resistant electronic cabin module, an underwater propeller, an underwater light and a counterweight module; figure 1 As shown, the design method of the observation type unmanned remote control submersible includes the following steps:
[0049] (1) According to the functional requirements of the observation-type unmanned remote control submersible, select and design the frame module, shell module, pressure-resistant electronic cabin module, motion module, lighting module and counterweight module;
[0050] (2) Complete 3D modeling and virtual assembly of functional components based on Solidworks software;
[0051] (3) According to the functional requirements, design the preliminary shape of the main body of the observation type unmanned remote control submersible;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More