

Magnetic resonance compatible handheld portable flexible interventional needle system
A magnetic resonance and portable technology, applied in the directions of surgery, puncture needles, trocars, etc., can solve the problems of difficult to control precision, inconvenient for professional doctors to grasp, difficult to use in surgery, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
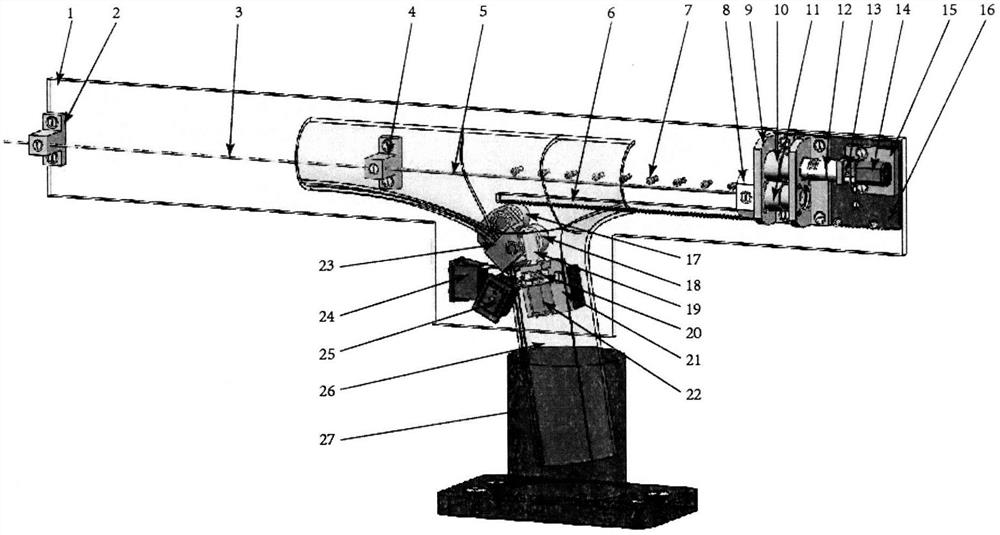
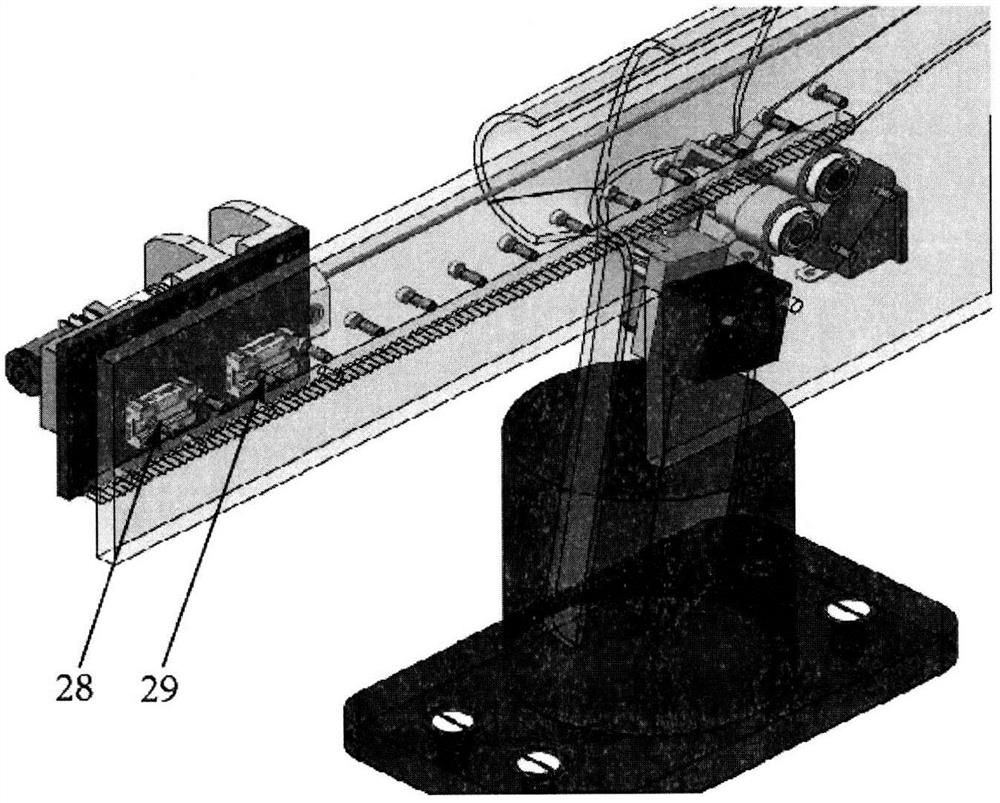
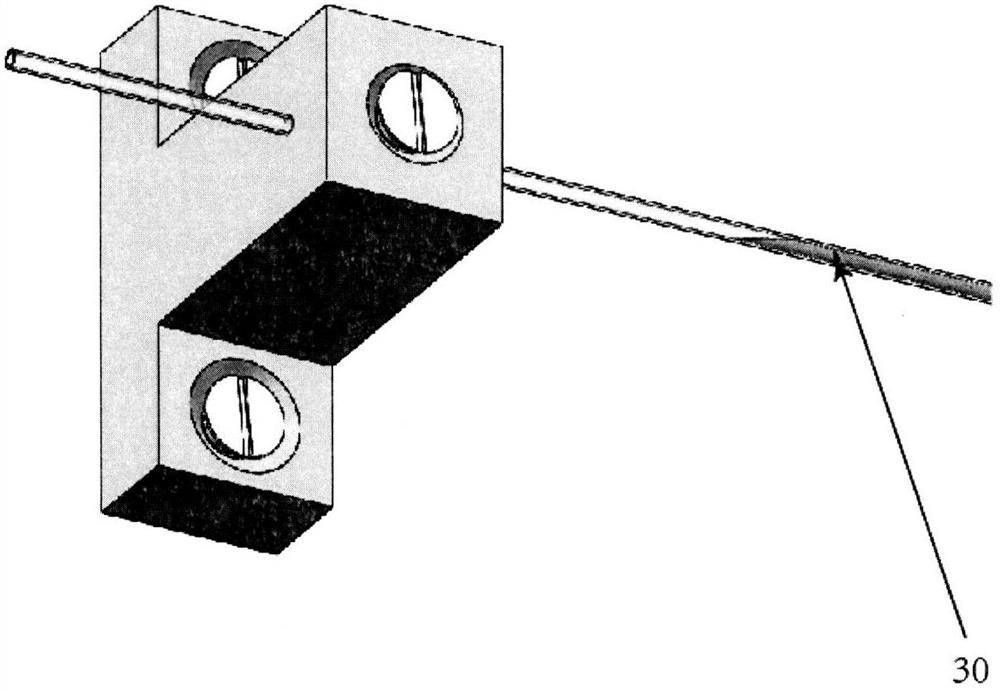
[0014] The present invention is a modular multi-joint flexible robot, such as Figure 1-3 As shown, it includes large fixing plate 1, needle tube fixing frame 1 2, rigid needle outer tube 3, needle tube fixing frame 2 4, rigid needle inner tube 5, rack 6, slide rail 7, needle tube fixing frame 3 8, gear fixing frame 19, spur gear 10, spur gear 11, coupling 12, reducer 13, motor 14, motor support seat 15, small fixed plate 16, spur gear 3 17, turbine 18, worm 19, speed reducer Device two 20, motor support seat two 21, motor two 22, gear holder two 23, control button one 24, control button two 25, system shell 26, base 27, slider 28 1, slider 29 2, flexible needle 30 .
[0015] The magnetic resonance compatible hand-held portable flexible needle system consists of a control part, a transmission part and a fixed part. Rigid needle outer tube 3, rigid ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More