

Few-joint over-constrained five-freedom-degree parallel serial robot
A degree of freedom and over-constrained technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to guarantee the overall rigidity of hybrid robots, high processing and manufacturing costs, and complex branch chain configurations, and achieve increased flexibility. Workspace, compact and simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
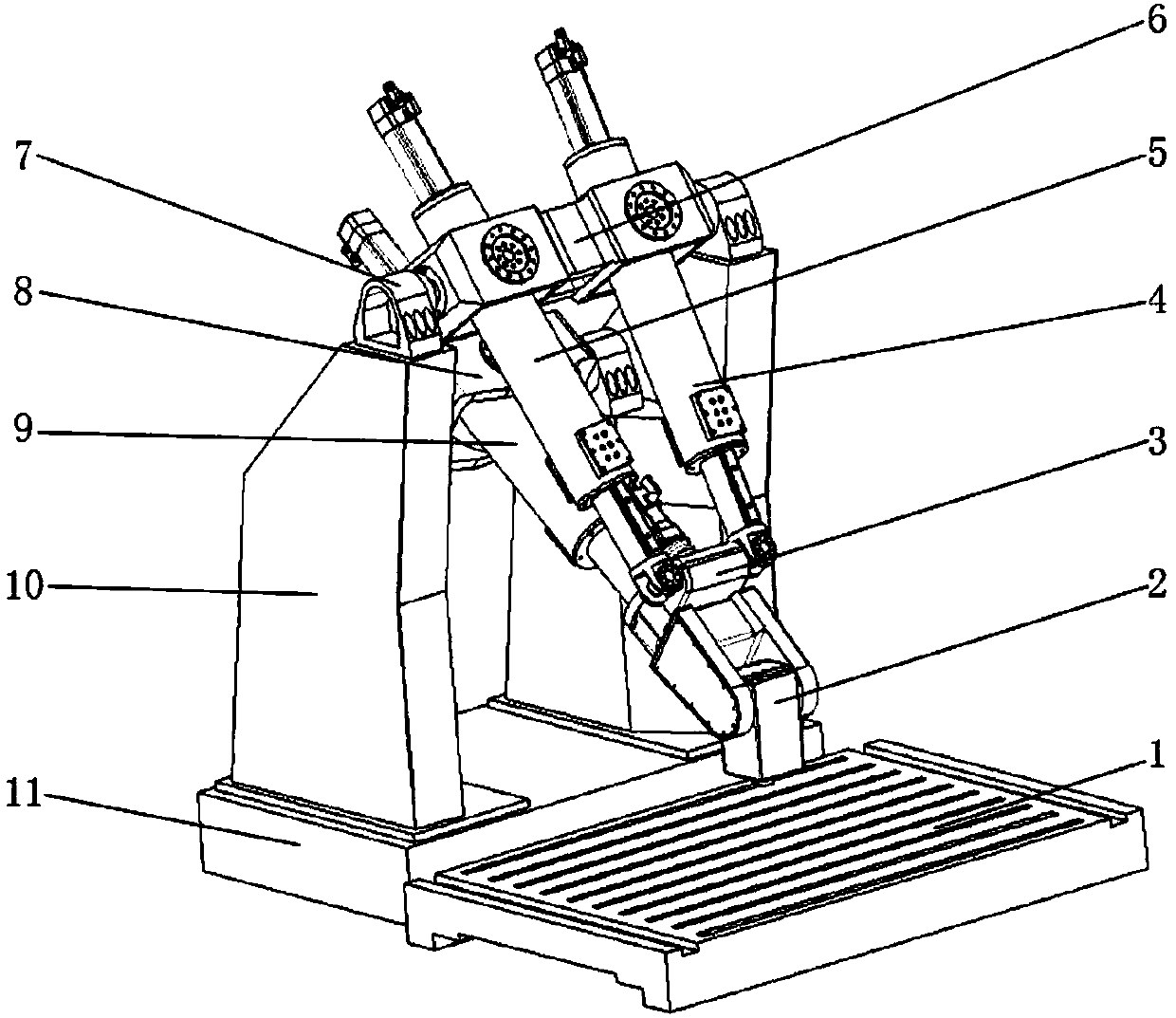
[0019] in figure 1 In the schematic diagram of the five-degree-of-freedom hybrid robot with few joints over-constrained, a working platform 1 is provided in front of the fixed platform 11, and a symmetrically arranged vertical stand 10 is provided on both sides of the fixed platform. There are three branch chains between the movable platform 3 and a two-degree-of-freedom attitude adjustment head 2 at the lower end of the movable platform; the upright stand, the movable platform and three branch chains form three degrees of freedom with two rotations and one movement Parallel mechanism
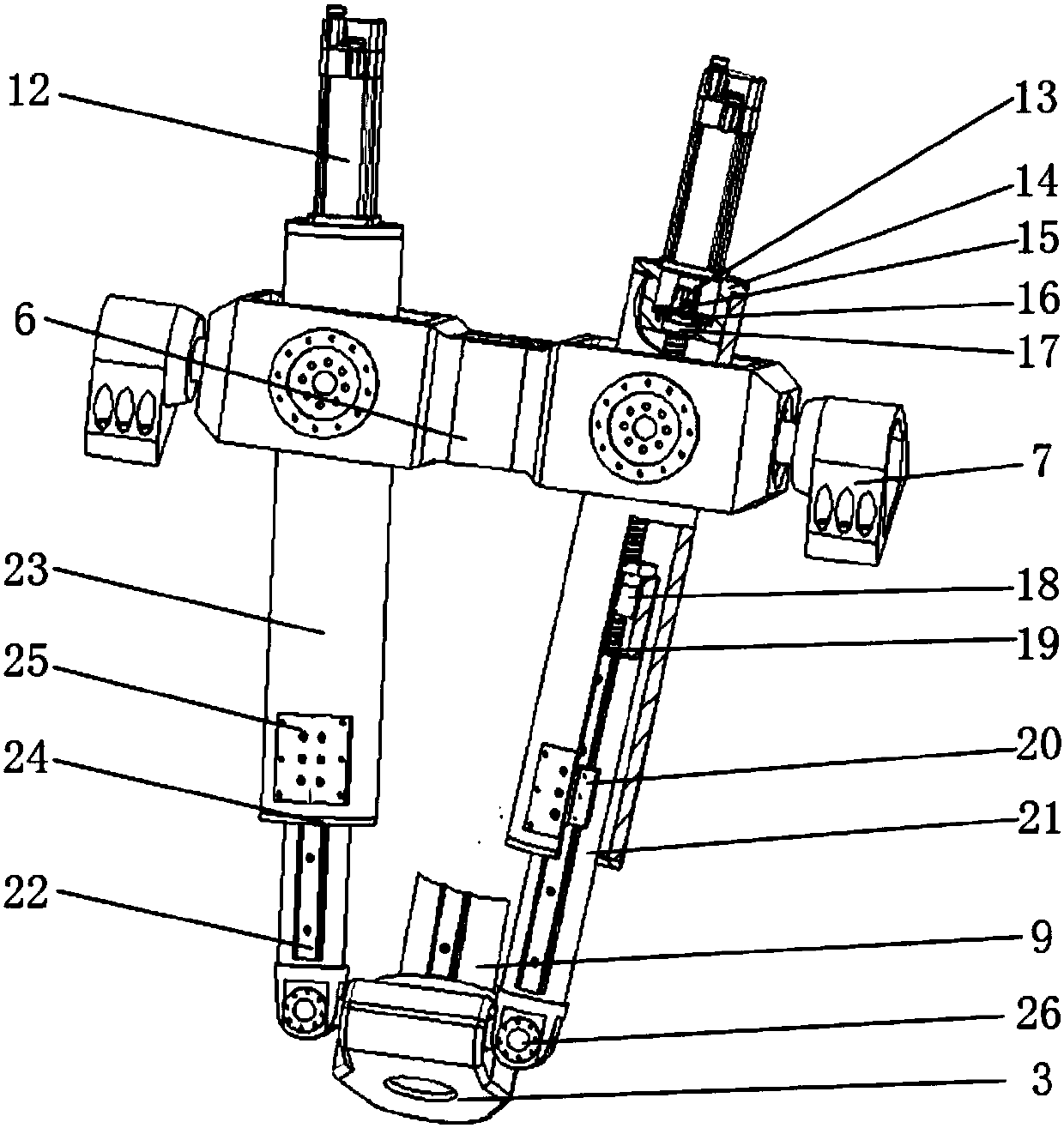
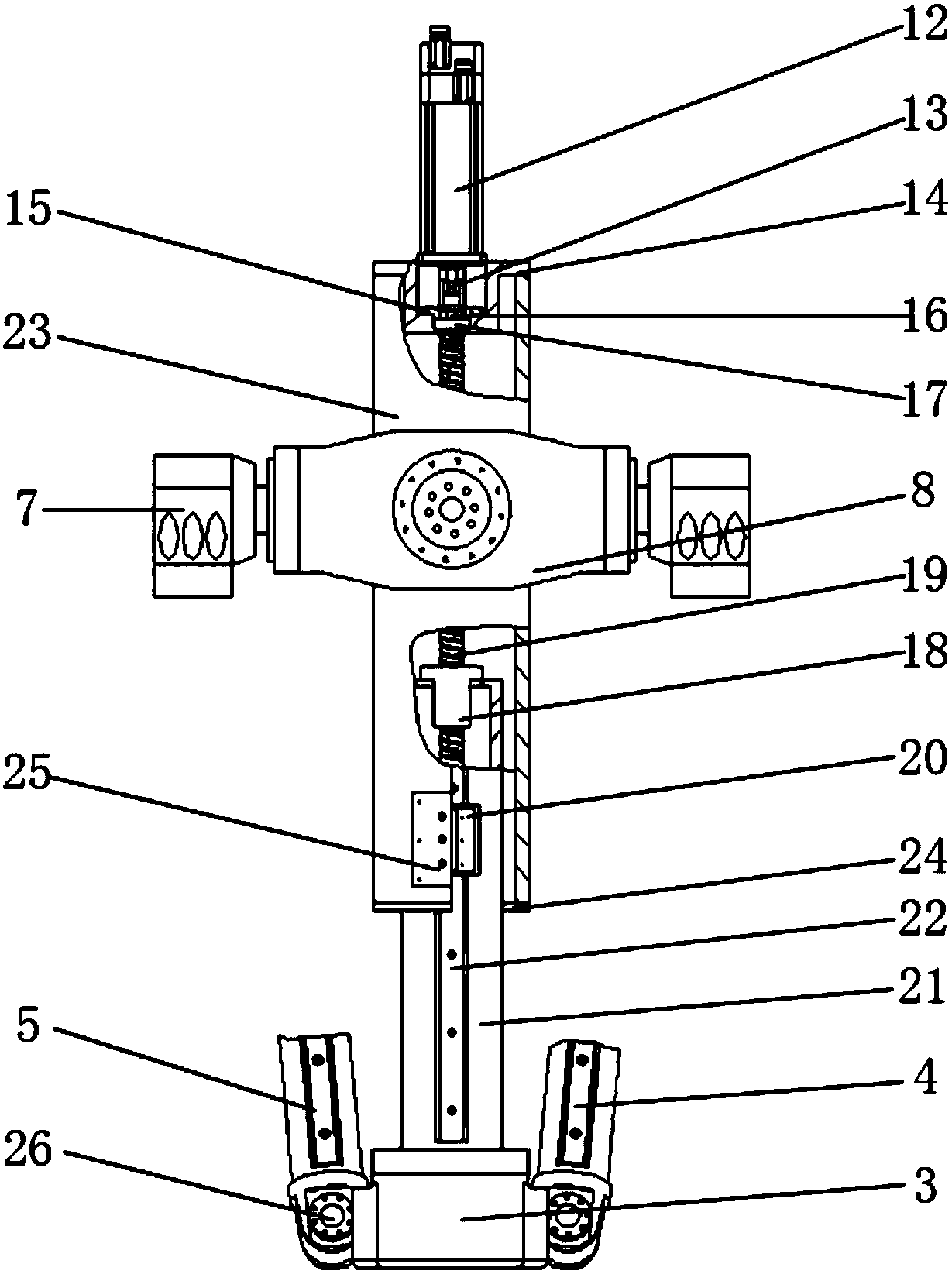
[0020] Such as figure 2 with image 3 As shown, the top of one end of the connecting rod sleeve 23 in the three branch chains with the same structure is provided with a servo motor base 14, and the servo motor 12 is provided on the servo motor base. In the connecting rod sleeve, the servo motor outputs The end of the screw is connected to one end of the screw 19 through the coupling 13. The scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More