Method for estimating noise covariance of unmanned aerial vehicle
A noise covariance, UAV technology, applied in the UAV field, can solve the problems of easy deviation and high operator requirements, and achieve the effect of ensuring accuracy and saving debugging time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
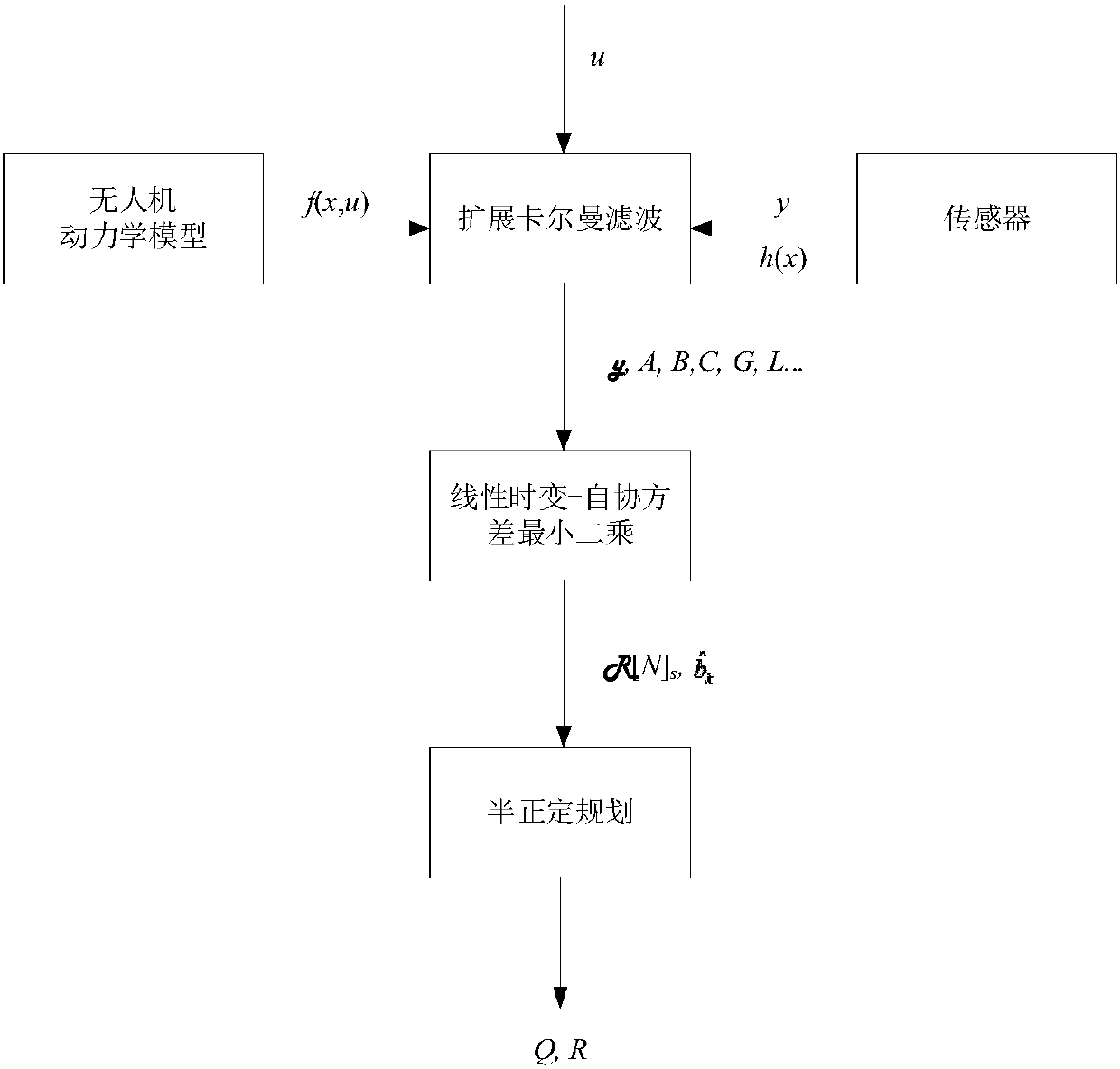
Method used
Image

Examples
Embodiment 1
[0100] Since the UAV dynamics model is a 12-dimensional equation system, when using the covariance least squares theory method to estimate the noise covariance in the model, in order to shorten the program running time, the noise covariance in the linear motion and the angular motion are respectively Make an estimate. The values of the parameters in the model used in the simulation are shown in Table 1.
[0101] Table 1 parameter values
[0102] parameter name
parameter value
parameter name
parameter value
UAV mass m
1.5kg
acceleration of gravity g
9.79m / s 2
x-axis moment of inertia I xx
0.024kg·m 2
y-axis moment of inertia I yy
0.024kg·m 2
Z-axis moment of inertia I zz
0.112kg·m 2
L
0.232m
Blade pull coefficient b
1.0643×10 -5
Blade torque coefficient d
2.3528×10 -7
Air resistance coefficient k
-0.2334
[0103] ①Line motion
[0104] The state...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More