

DELTA2 robot control system based on soft PLC and EtherCAT bus
A control system and robot technology, applied in the field of machinery, can solve the problems of not too wide application range, real-time performance and stability, and few application cases, so as to shorten the research and development cycle, openness, and hardware The effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with drawings and embodiments.
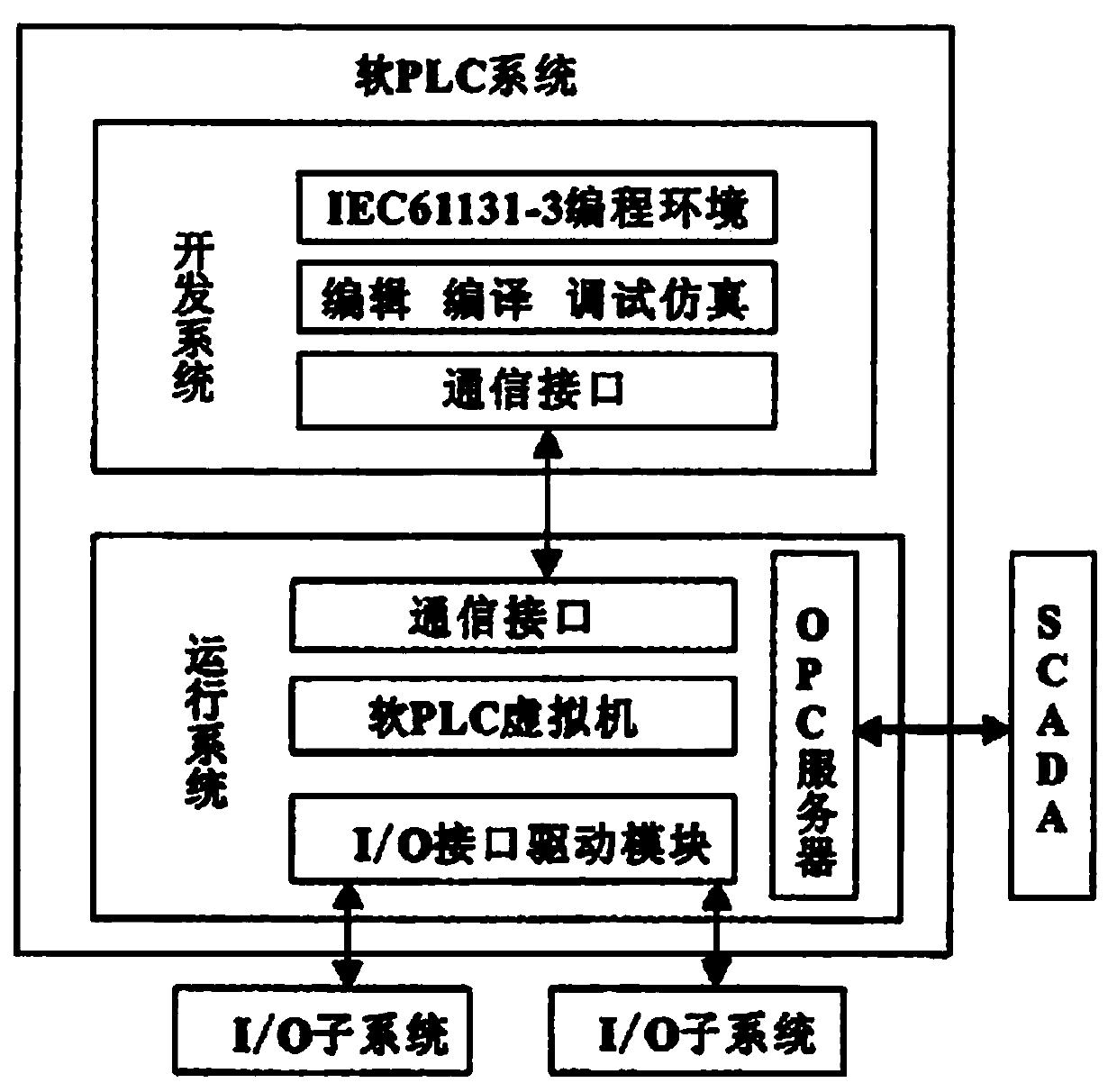
[0015] Such as figure 1 , Soft PLC can be divided into two parts: development system and operation system. The development system and the operating system are client / service mode, and the upper and lower communicate through C-OM / DCOM mode, and the operating environment provides a standard communication interface as a server. As a C-OM client application, the development environment can access these interfaces and perform operations.
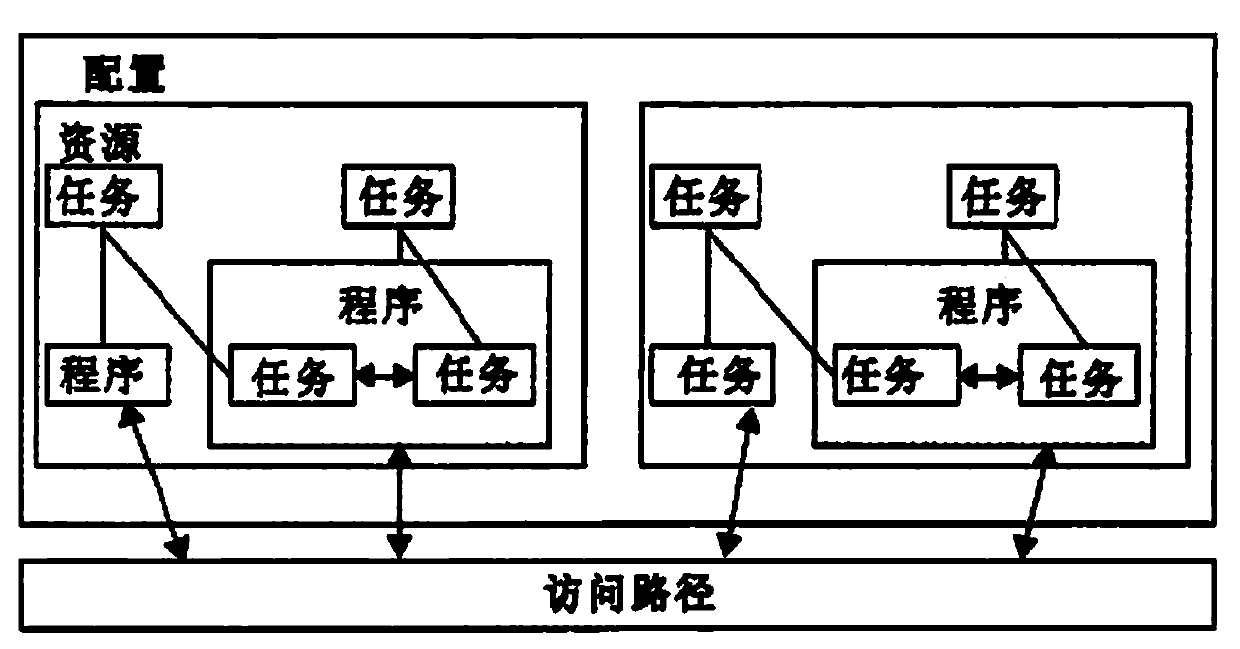
[0016] Such as figure 2 , the development system is a PLC programmer with debugging and compiling functions, which is actually designed according to the IEC61131-3 standard. The IEC61131-3 software model is a hierarchical structure that describes many concepts including configuration (Configuration), resource (Resource), task (Task), program (Program), function block (FunctionBlock) and function (Function), etc. and their The relation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More