

Complicated workpiece track planning and simulating system on basis of ROS (robot operating system) platforms
A technology for complex workpieces and simulation systems, applied in manufacturing tools, manipulators, program-controlled manipulators, etc., can solve problems such as trajectory planning cannot be achieved on complex surfaces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
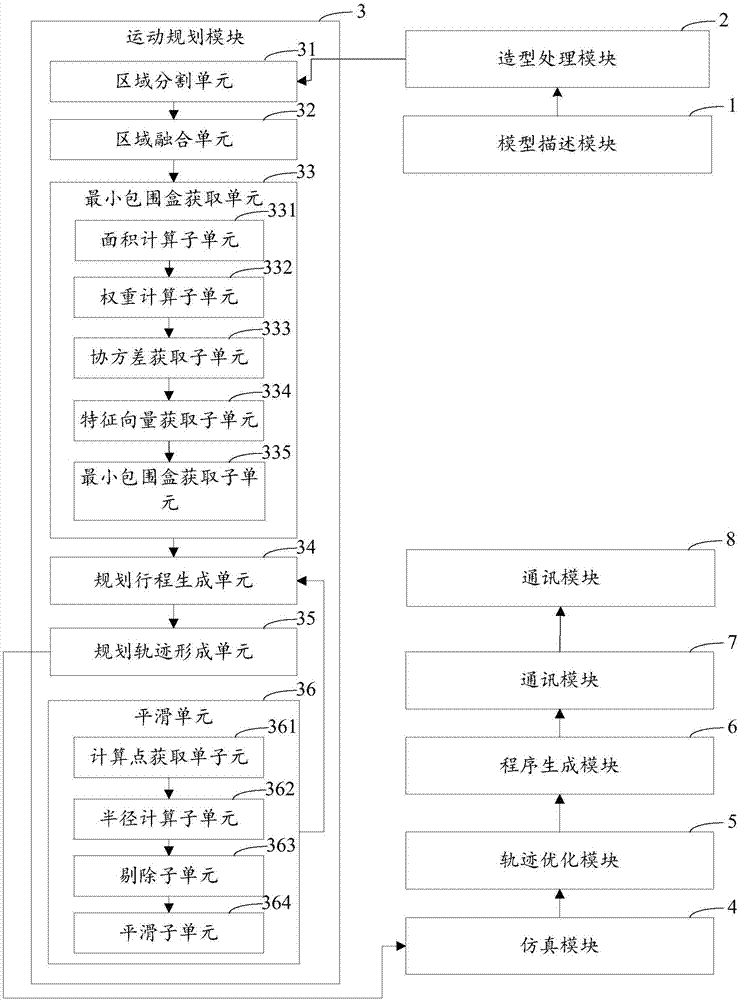
[0055] figure 1 The structure schematic diagram of the complex workpiece trajectory planning simulation system based on the ROS platform provided for the embodiment of the present invention, for the convenience of description, only shows the parts related to the embodiment of the present invention.
[0056] The complex workpiece robot planning simulation software system based on the ROS platform provided by the embodiment of the present invention includes: a computer operating system layer, a robot system layer, and a planning simulation software layer;
[0057] Among them, the Linux system is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More