

LabVIEW real-time module based pneumatic manipulator control system
A technology of a pneumatic manipulator and a control system, applied in the field of machinery, can solve problems such as inconvenience in use, and achieve the effects of convenient adjustment and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with drawings and embodiments.
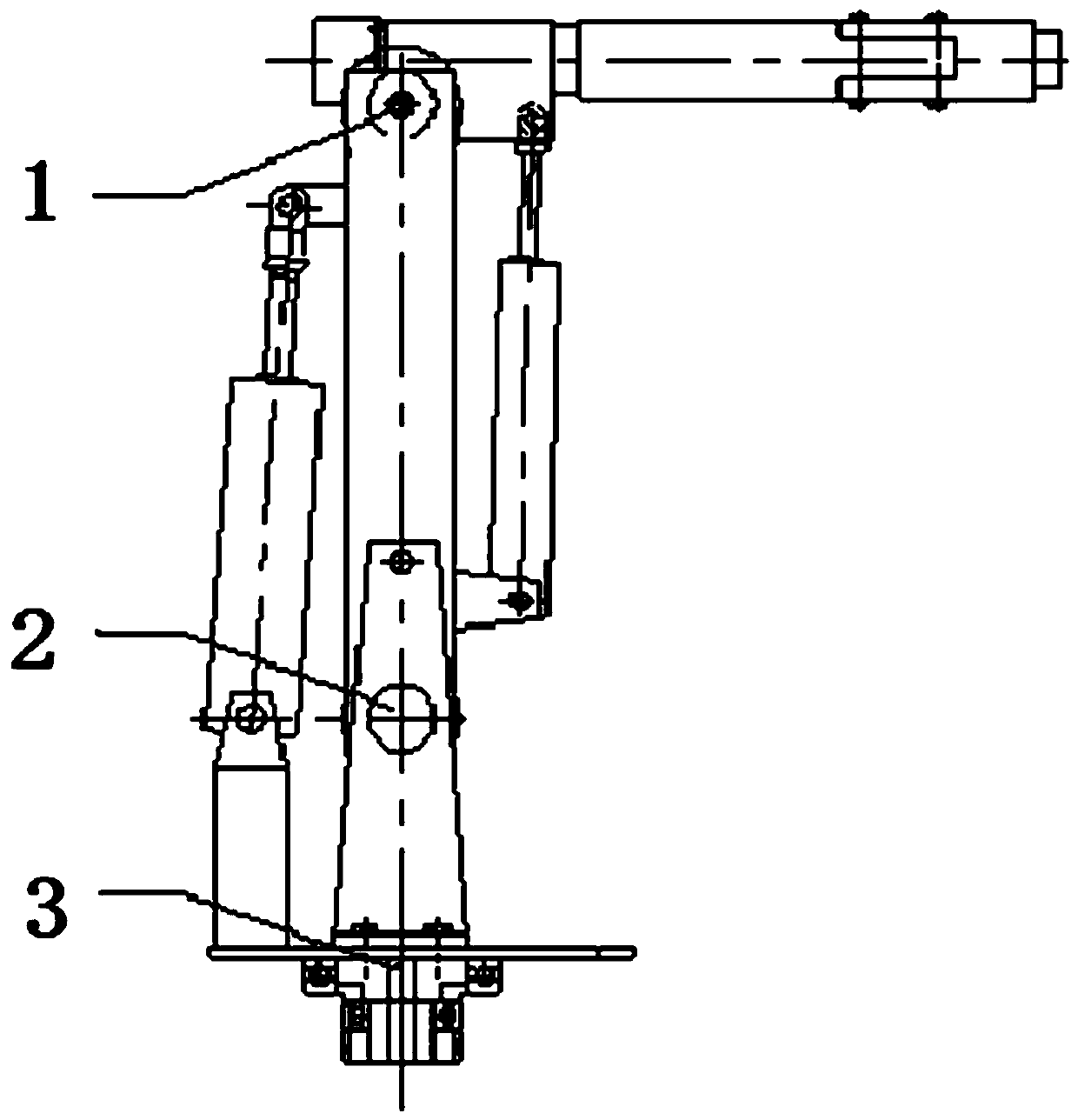
[0015] Such as figure 1 , 3 white by degrees pneumatic manipulator belongs to joint series robot, its movement is similar to human limbs, and consists of three joints of waist, upper arm and forearm.
[0016] The waist is a rotary motion, which is realized by a single rack and pinion swing cylinder driven by a flow proportional valve. The rotary encoder is connected with the rotation shaft of the waist through a 1:4 synchronous pulley to detect the angle signal; the large and small arms are pitching motions , is realized by driving a single-rod double-acting cylinder with a flow proportional valve. The rotary encoder is connected to the corresponding pitching axis of the large and small arm joints through a 1:4 synchronous pulley to detect the angle signal. In this way, the closed-loop control of single joint is realized, and then the spatial motion control of the end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More