

Multi-joint heavy load mechanical arm driven by single-blade hydraulic swing oil cylinders
A hydraulic swing, single-blade technology, used in manipulators, program-controlled manipulators, joints, etc., can solve the problems of delayed work process, long development cycle, self-weight ratio, low power density, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
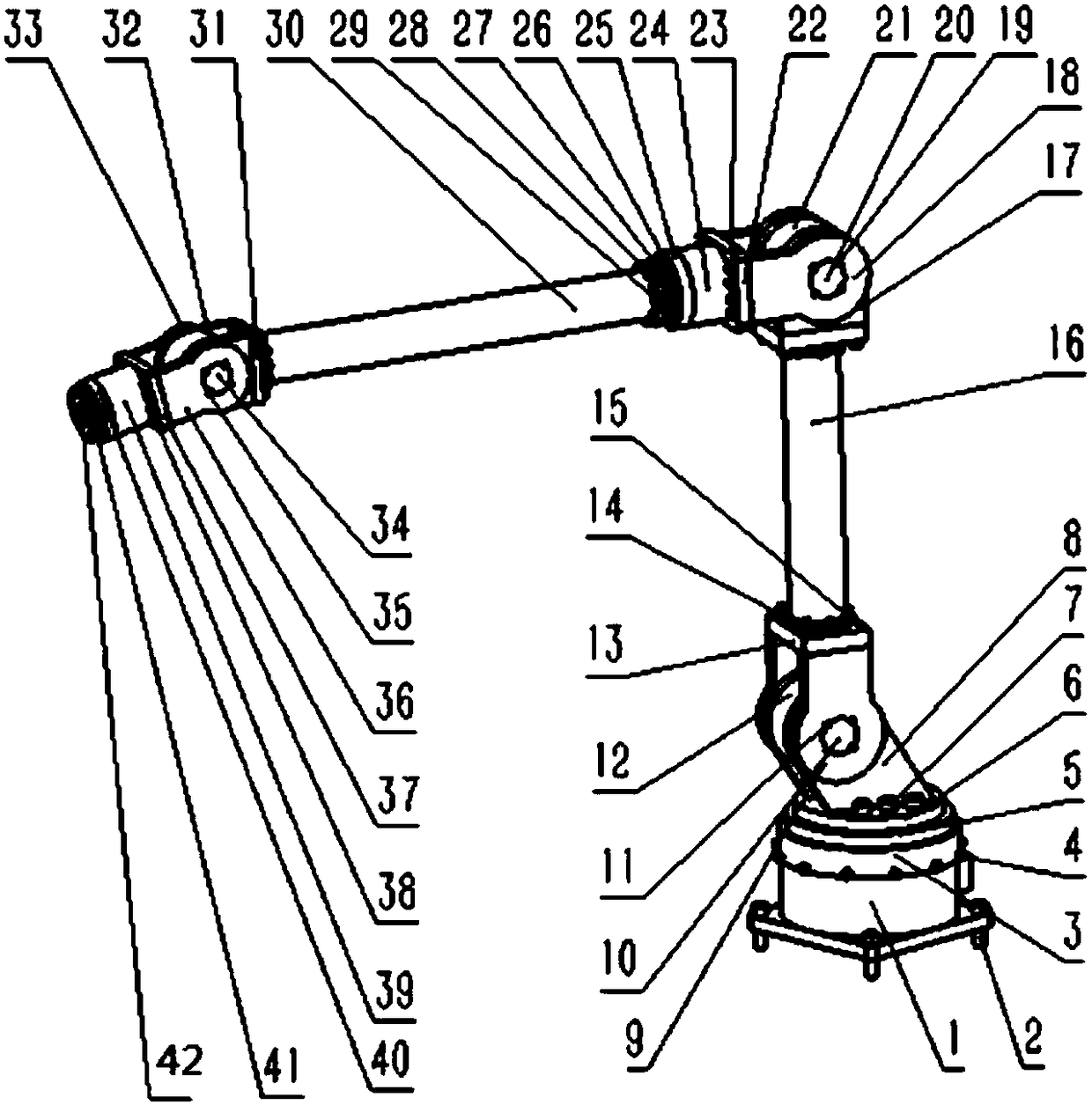
[0024] Below by embodiment, in conjunction with accompanying drawing, the technical scheme of the present invention is described further specifically, as figure 1 As shown, the multi-joint heavy-duty mechanical arm of the present invention is mainly composed of a base module, a waist joint module, a shoulder joint module, a wrist joint module, a large arm, a small arm, flanges, and bolts composed of six single-blade hydraulic swing cylinders. The J1 cylinder and J2 cylinder, the J3 cylinder and the J4 cylinder, the J5 cylinder and the J6 cylinder are all vertically arranged to form the waist joint module, the shoulder joint module and the wrist joint module respectively. The installation of the J1 cylinder and related parts In the base, the positioning bolts of the base can be connected with the ground or the workbench according to the work requirements.
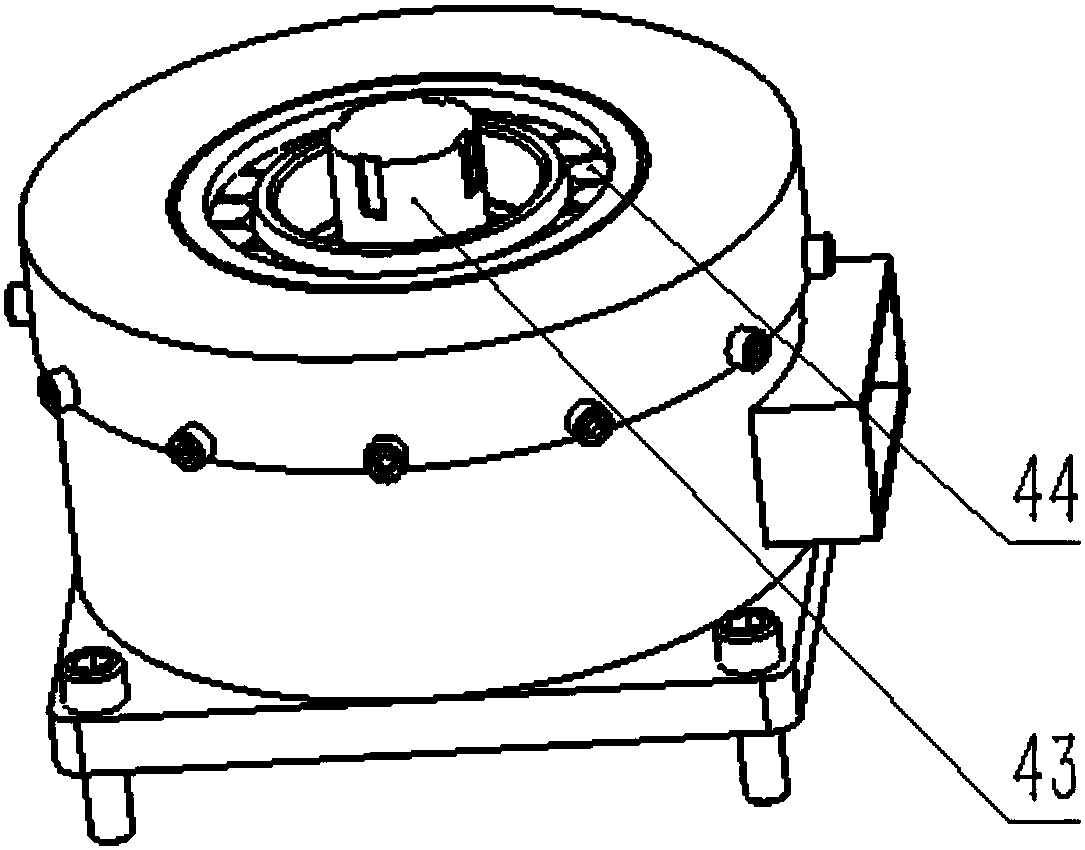
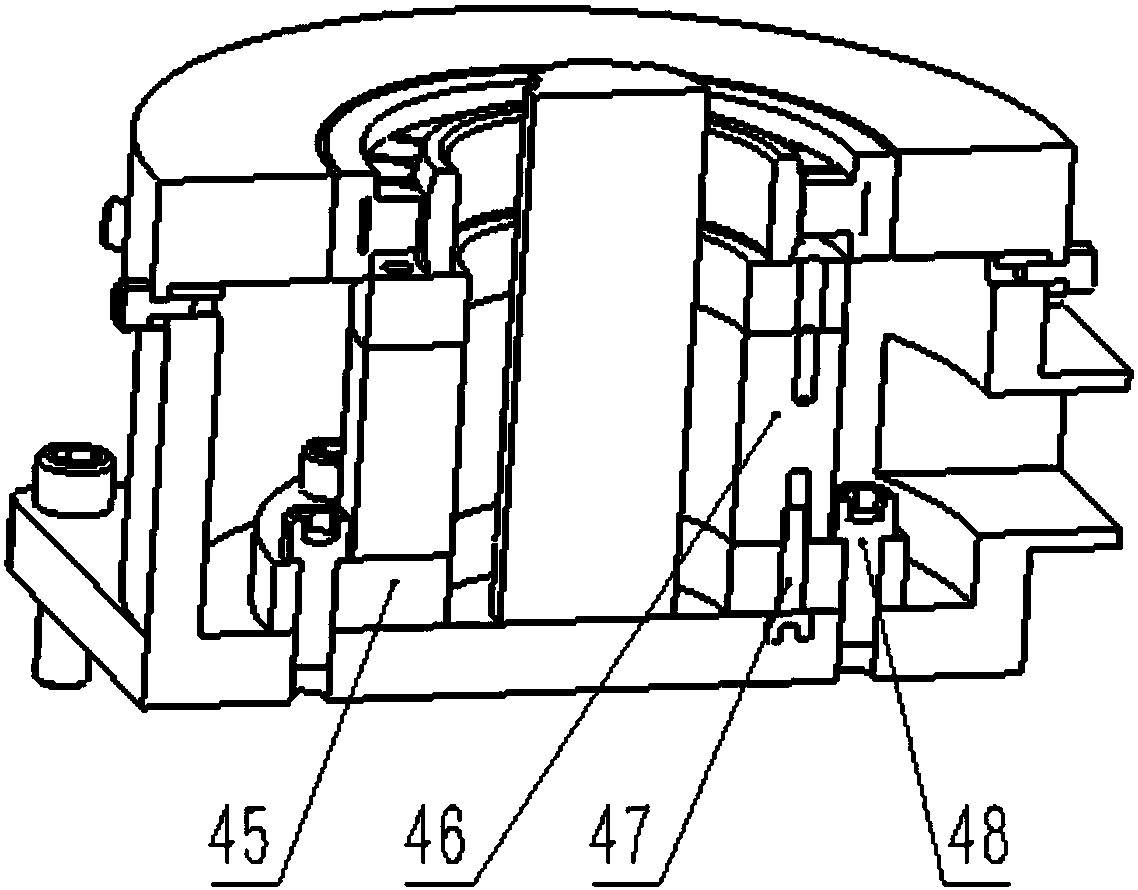
[0025] figure 2 and image 3 Shown are the base module and the sectional view of the base module respectively, the J1 o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More