

An Active Disturbance Rejection Control Method for Space Robots with Actuator Saturation
A space robot, active disturbance rejection control technology, applied in the direction of adaptive control, attitude control, general control system, etc., can solve problems such as unsatisfactory control effect, continuous optimization, system output chattering, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The present invention is described in further detail below in conjunction with accompanying drawing:
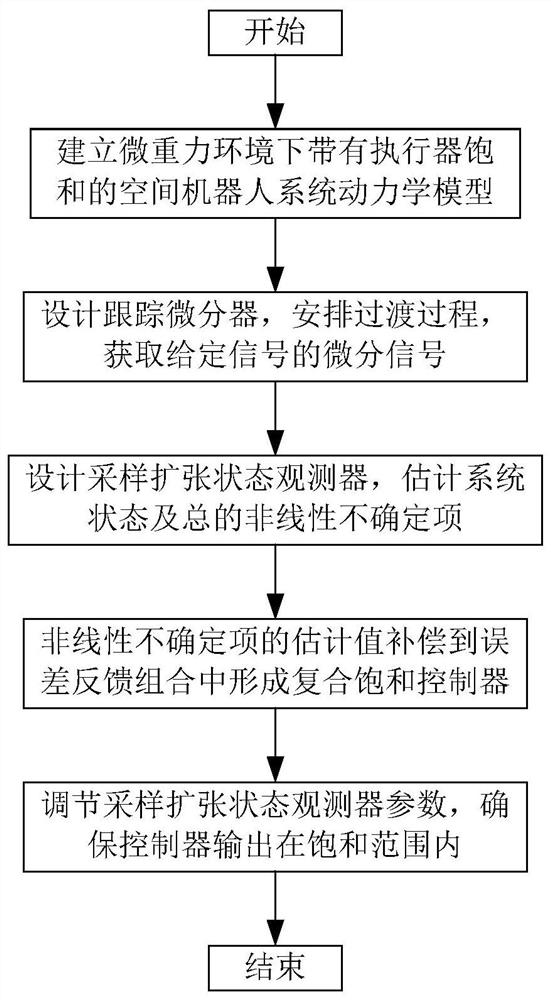
[0052] see figure 1 , the present invention proposes a sampling output space robot position and attitude controller based on ADRC and actuator saturation theory, and its implementation steps are as follows:
[0053] Step 1: Construct a dynamic model of a space robot system with actuator saturation in a microgravity environment
[0054] Establish geographic coordinate system Ox n the y n z n , x, y, z refer to the space robot at Ox n 、Oy n and Oz n The position of direction, n is the mark of geographical coordinate system; Establish space robot body coordinate system Ox b the y b z b , b is the label of the body coordinate system; according to Ox n the y n z n with Ox b the y b z b relationship, establish the following equation:
[0055] in, Indicates the velocity vector of the space robot in the geographic coordinate system υ=[u, v, w, p, q, r] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More