Mechanical structure design for independent multi-sucker climbing arm system of wall climbing robot
A technology of wall-climbing robots and mechanical structures, applied in the field of mobile robots, can solve problems such as danger, and achieve the effects of strong load capacity, large load capacity and wide range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
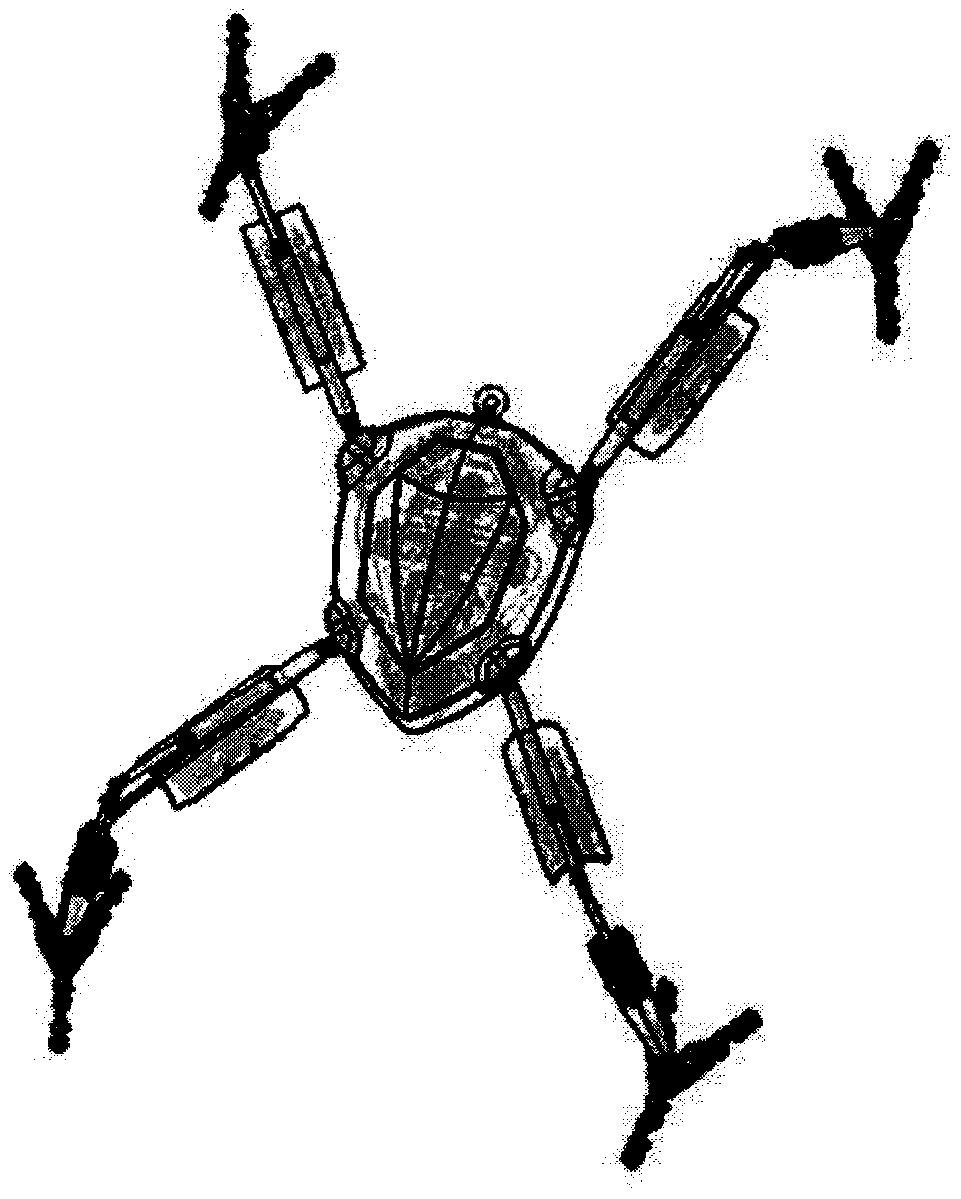
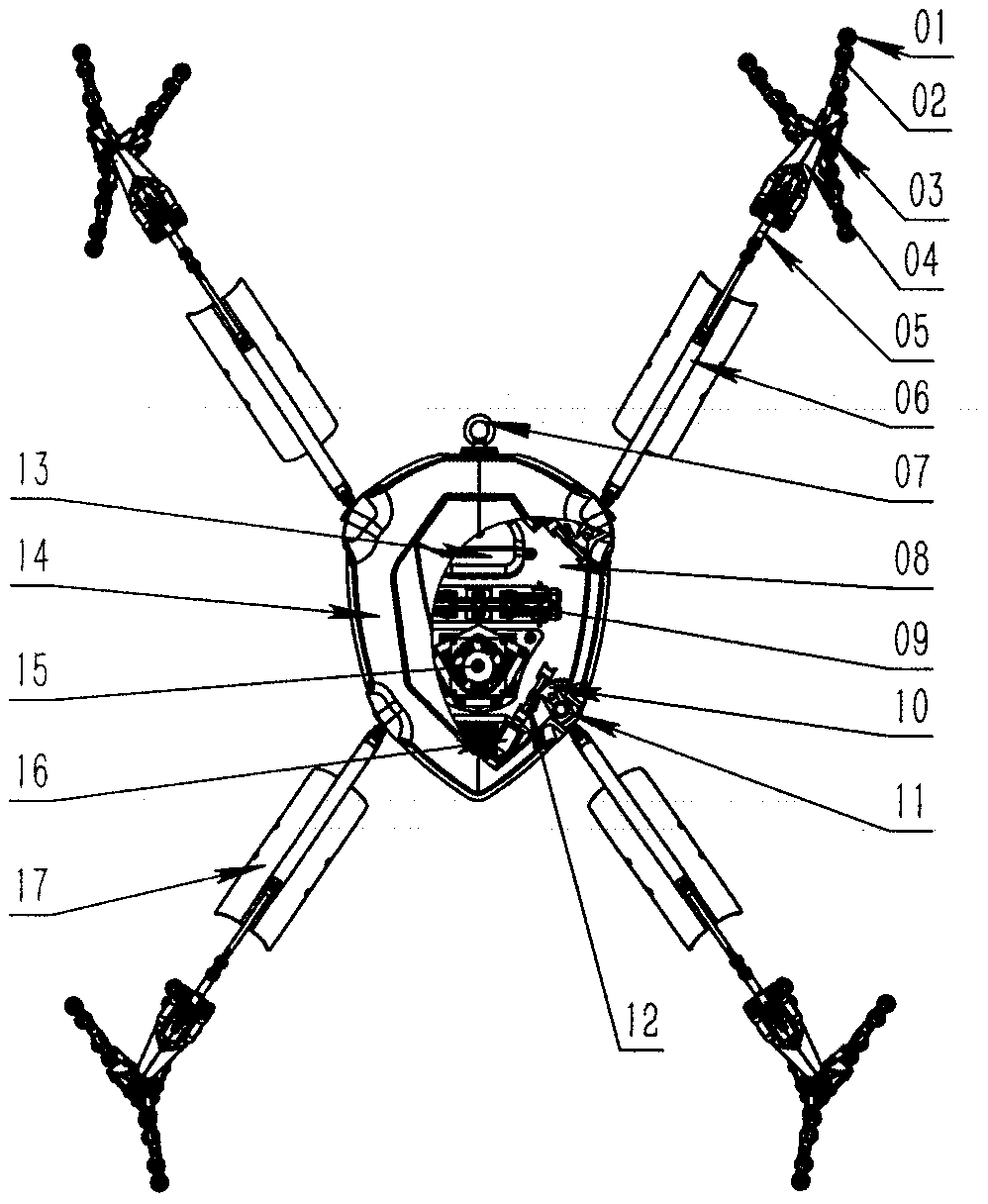
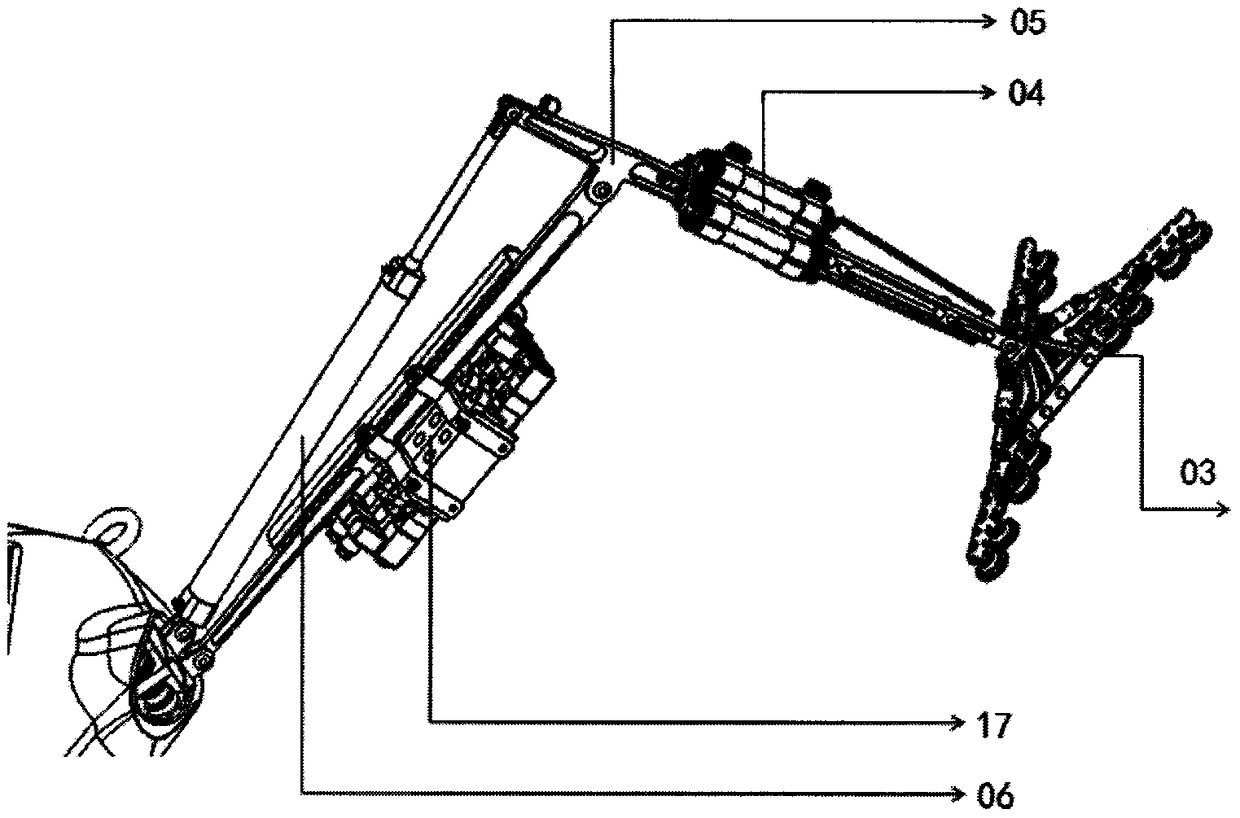
[0023] Figure 1 to Figure 13 It schematically shows the mechanical structure of an independent multi-suction cup climbing arm system of a wall-climbing robot according to the present invention.
[0024] This embodiment provides a mechanical structure of an independent multi-suction cup climbing arm system for a wall-climbing robot. The initial power source is electric power, and the main power source is electric power and pneumatic elements. Initially, electric power is used to drive the pneumatic pump to generate high-pressure air, and then through the air pipe and electromagnetic pneumatic valve to control the pneumatic functions, the expansion of the climbing claws and the realization of the adsorption of the multi-suction cup system, and the control of the four high-torque DC servo motors for climbing the wall It is driven by 24V electricity, and the single-chip CPU control system is driven by 5V electricity.
[0025] The specific implementation method of the climbing ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com