

Separated type actuating mechanism for deep-sea visual sampler
An actuator and separate technology, applied in the field of separate actuators, can solve the problems of inability to replace work tools according to different operation requirements, ROV does not have large weight carrying capacity, ROV working environment is complex and changeable, etc. Power transmission efficiency, easy power adjustment, and the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
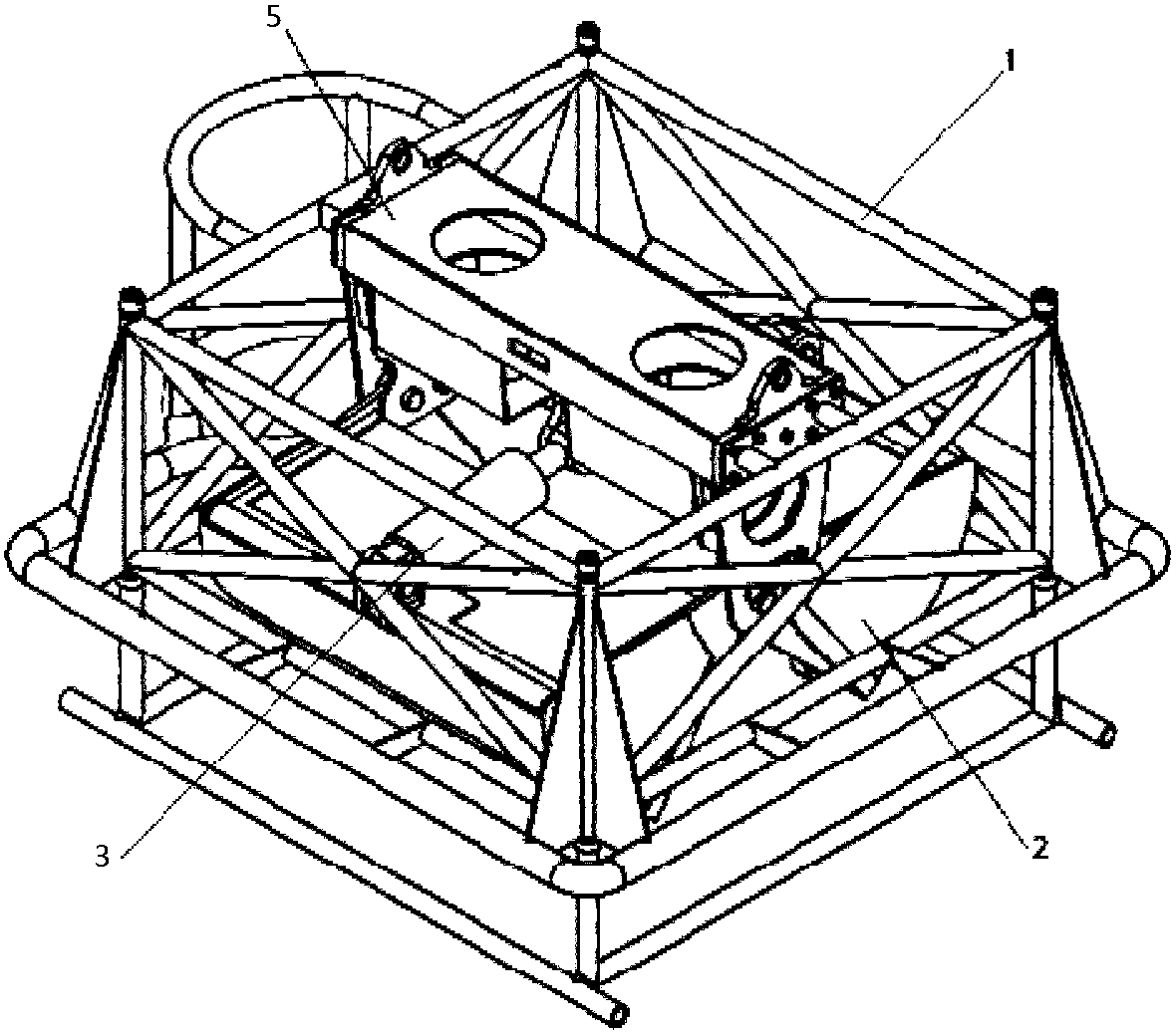
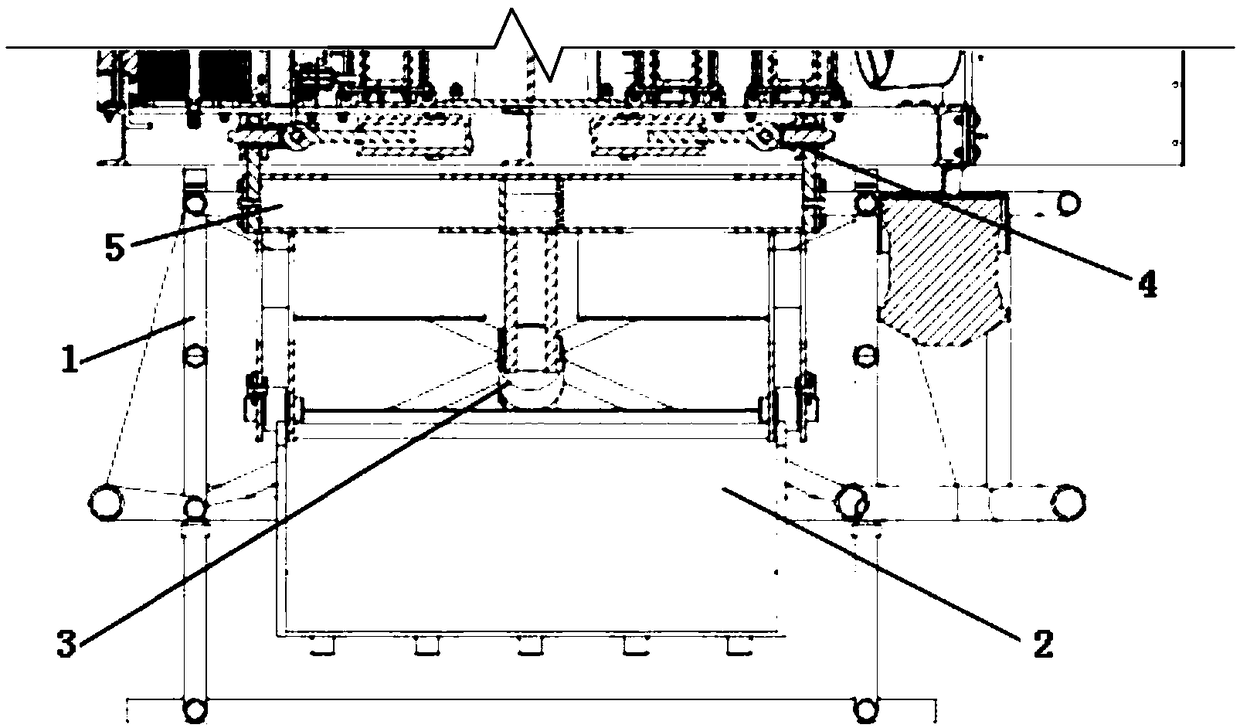
[0029] A separate executive mechanism of a deep-sea visual sampler proposed by the present invention is described in detail as follows in conjunction with the accompanying drawings and an embodiment:
[0030] The separate actuator of the deep-sea visual sampler of the embodiment of the present invention has a structure such as figure 1 , figure 2 As shown, the actuator includes a peripheral non-bearing frame 1, a load-bearing structure 5 located in the frame, a grab bucket 2 and a grab hydraulic cylinder 3; The upper part of the force frame 1 is fixed, and the two bucket-shaped jaws of the grab 2 are respectively driven by a grab hydraulic cylinder 3. The bottom cover of the grab hydraulic cylinder is rotatably connected with the corresponding bucket-shaped jaw. The top end of the piston rod of the cylinder is rotatably connected with the middle part of the bottom end of the load-bearing structure 5; Control system (this control system is the operation control center of thi...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
| force | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More