

Calculating method and device of virtual accelerator and controller
A calculation method and throttle technology, applied in the direction of program control and electrical program control in sequence/logic controllers, can solve problems such as complex system control, low calculation efficiency, and multiple code spaces, so as to save code space and simplify algorithms method, flexible effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
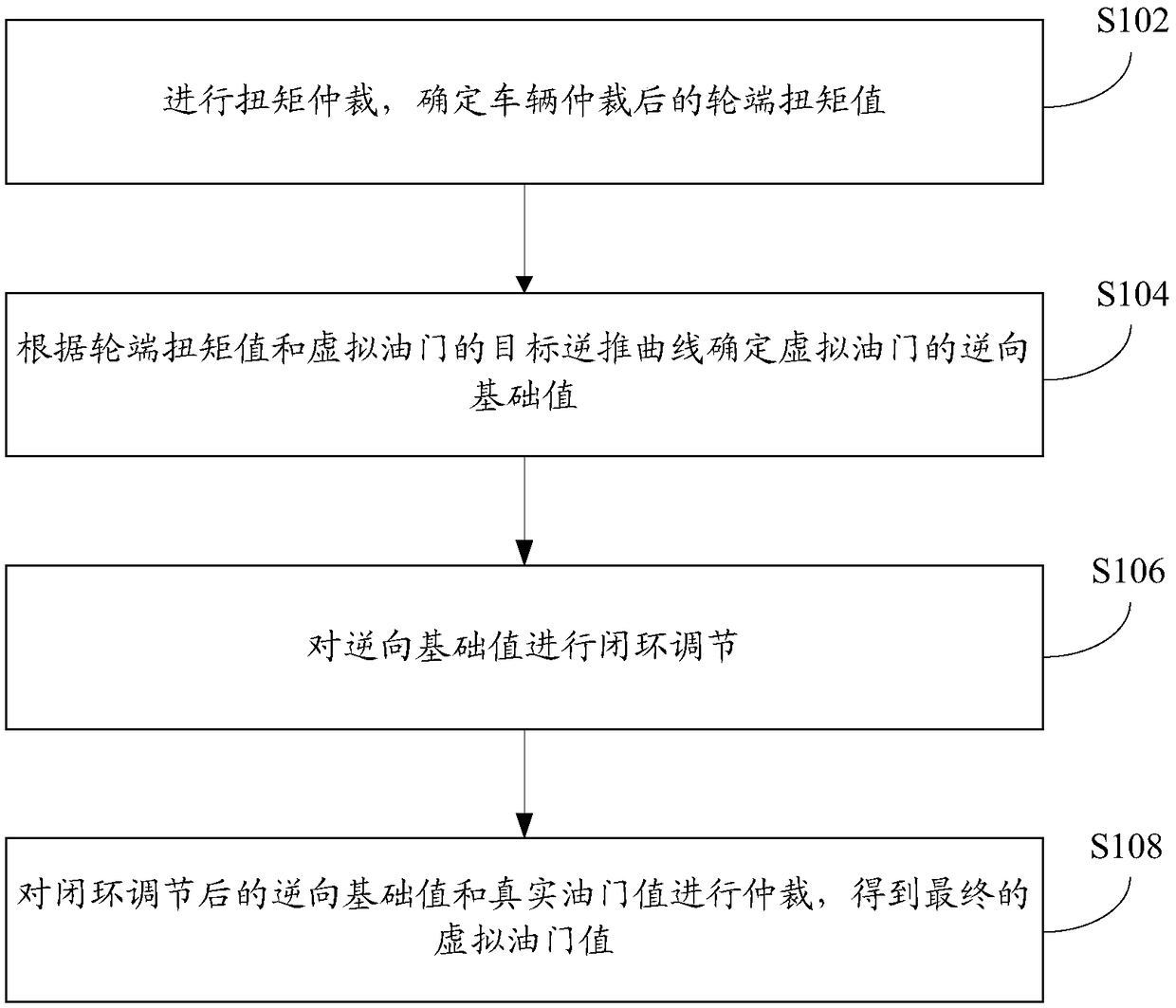
[0034] The embodiment of the present invention provides a calculation method of a virtual throttle, which integrates a closed-loop control method, and realizes simulation calculation of a virtual throttle by using torque as a closed-loop target. The above calculation method can be realized based on software tools such as MATLAB / Simulink. see figure 1 The flow chart of the calculation method of the shown virtual throttle, the method includes the following steps:
[0035] Step S102, perform torque arbitration, and determine the wheel end torque value after vehicle arbitration.
[0036] Among them, for the intelligent control functions involving the use of virtual throttle, such as ACC adaptive cruise function, APA automatic parking function, etc., torque arbitration is performed on the relevant intelligent control functions, mainly including the intervention torque of the relevant intelligent control functions in the system wheel. Arbitration of response priority among termina...
Embodiment 2
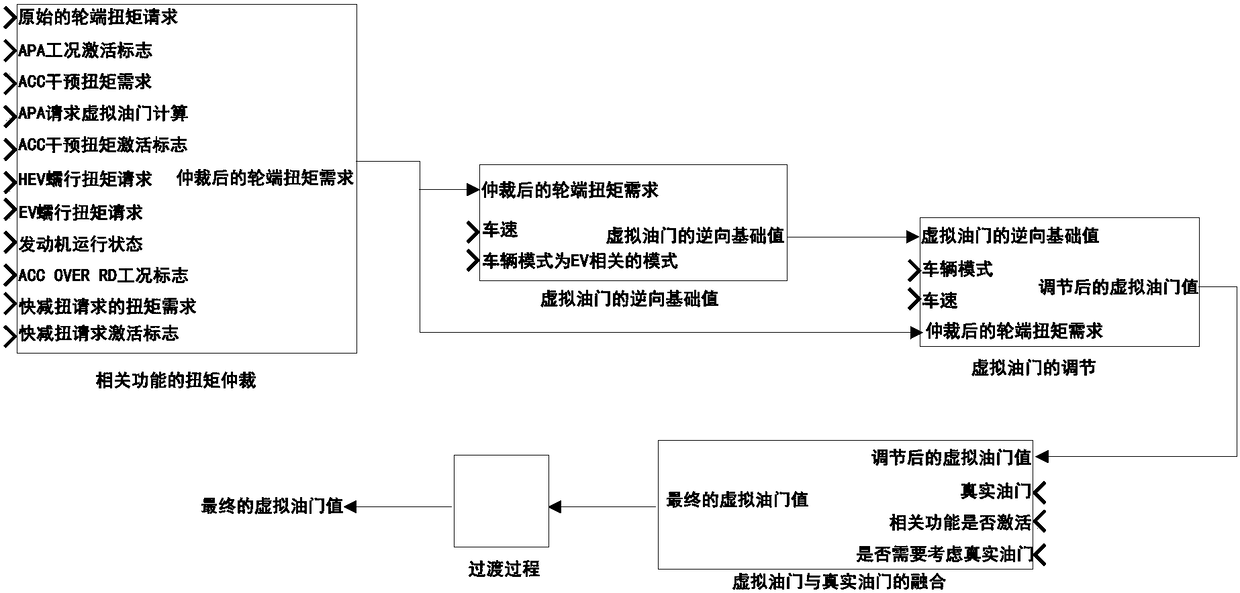
[0047] see figure 2 The schematic diagram of the calculation method of the virtual throttle is shown, which shows each process step in the above-mentioned embodiment.
[0048] Wherein, the steps of carrying out the wheel end torque arbitration of related functions include:
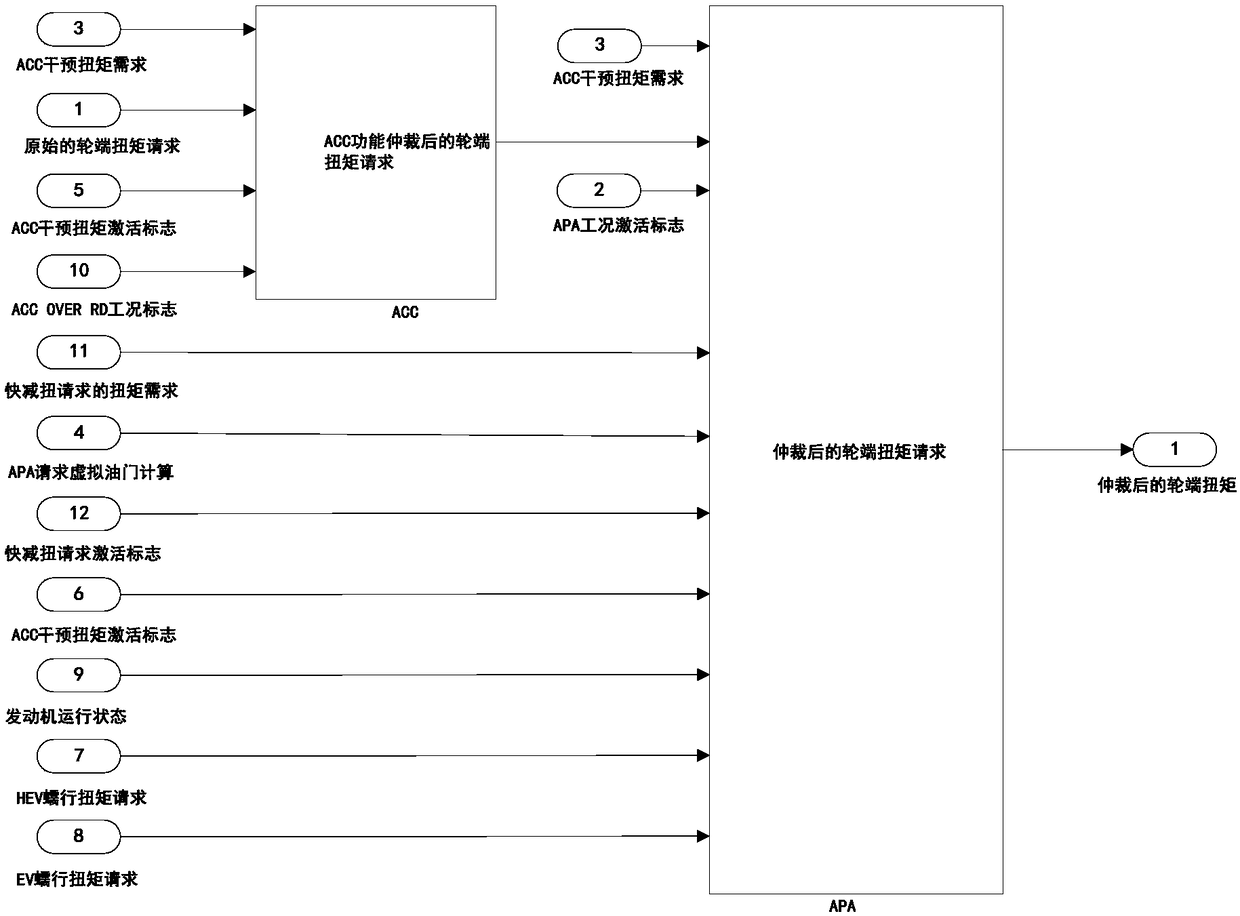
[0049] (1) Determine the control function that needs to use the virtual throttle. exist figure 2 Several control functions that require the use of a virtual throttle are shown in , including functions such as adaptive cruise (ACC), automatic park assist (APA), creep, and fast deceleration. see image 3 The schematic diagram of the principle of torque arbitration of related functions is shown, which shows the process of arbitration between functions. image 3 The above is just an example of implementation, and it can also be expanded or tailored according to the requirements of specific projects.
[0050] (2) Perform torque arbitration according to the response priority of the intervention torque of ...
Embodiment 3
[0064] An embodiment of the present invention provides a computing device for a virtual throttle, see Figure 9 The structural block diagram of the calculation device of the shown virtual throttle, the device includes:
[0065] The wheel-end torque determination module 910 is used for torque arbitration, and determines the wheel-end torque value after vehicle arbitration;
[0066] The reverse base value determination module 920 is used to determine the reverse base value of the virtual throttle according to the wheel end torque value and the target reverse curve of the virtual throttle; the target reverse curve includes at least two virtual throttle reverse curves of power modes;
[0067] A closed-loop adjustment module 930, configured to perform closed-loop adjustment on the reverse basic value;
[0068] The arbitration module 940 is configured to arbitrate the closed-loop adjusted reverse basic value and the real throttle value to obtain the final virtual throttle value.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More