

A navigation system and precise three-point positioning method for underwater deep submersible
A three-point positioning, deep-submersible technology, used in surveying, mapping and navigation, radio wave measurement systems, satellite radio beacon positioning systems, etc. Reports and other issues, to achieve strong environmental adaptability, simple positioning methods, and good portability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the drawings and specific embodiments.
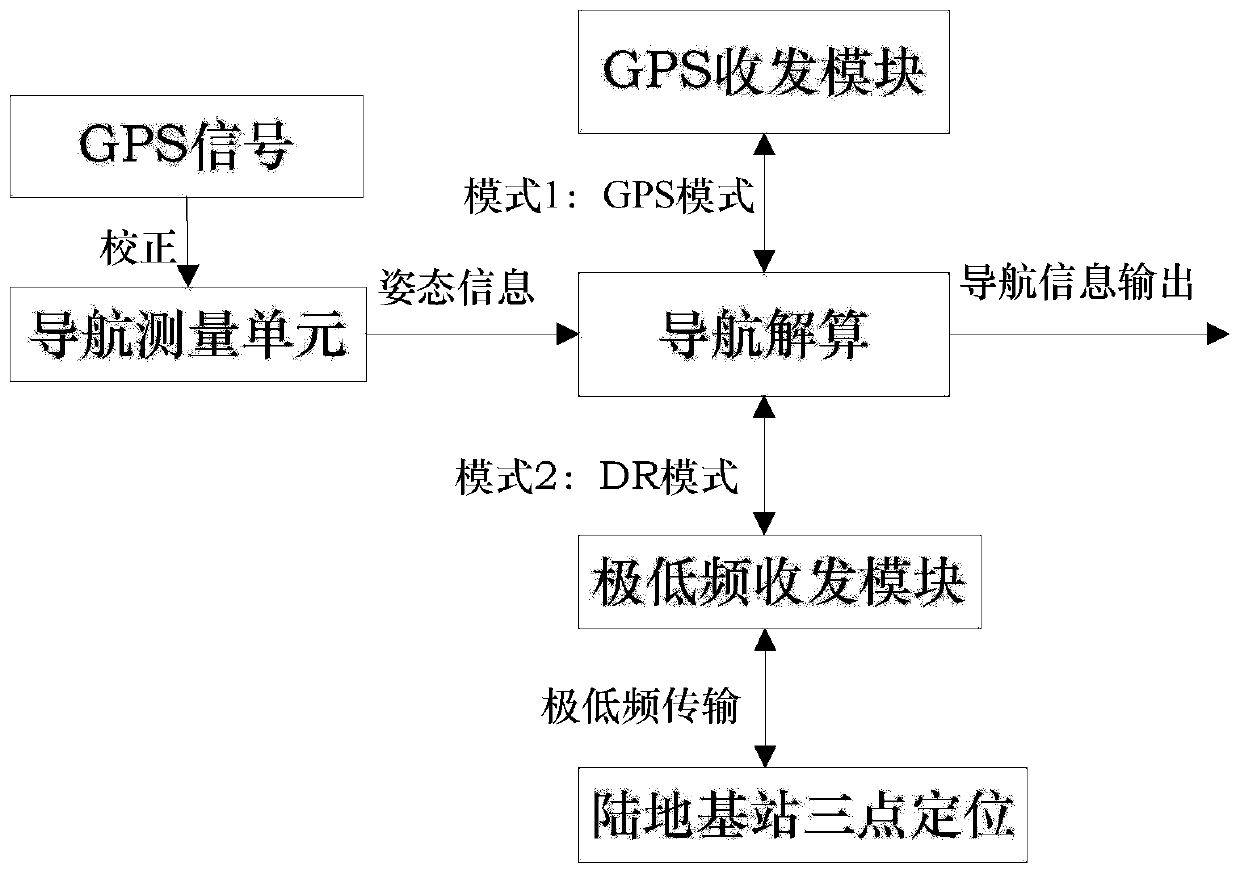
[0029] In order to improve the accuracy, stability, and low power consumption of the autonomous navigation of the underwater deep submersible vehicle, the present invention improves the design of the information receiving mode of the integrated navigation, and adopts low-frequency electromagnetic wave transmission deep Navigation information of the submersible. The navigation system for the underwater deep submersible includes a global positioning system GPS transceiver module, an extremely low frequency transceiver module, a navigation measurement unit, a digital signal processing (DSP) unit and a deep submersible central computer. The navigation measurement unit includes MEMS inertial measurement Unit (MEMS IMU) and electronic compass; the GPS transceiver module, extremely low frequency transceiver module, micro-electromechanical inertial measurement unit, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More