

Constant force grinding control system and method
A control system and constant force technology, applied in general control systems, control/adjustment systems, mechanical pressure/force control, etc., can solve the problems of low efficiency and low surface quality of artificially ground products, and achieve accurate force measurement and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
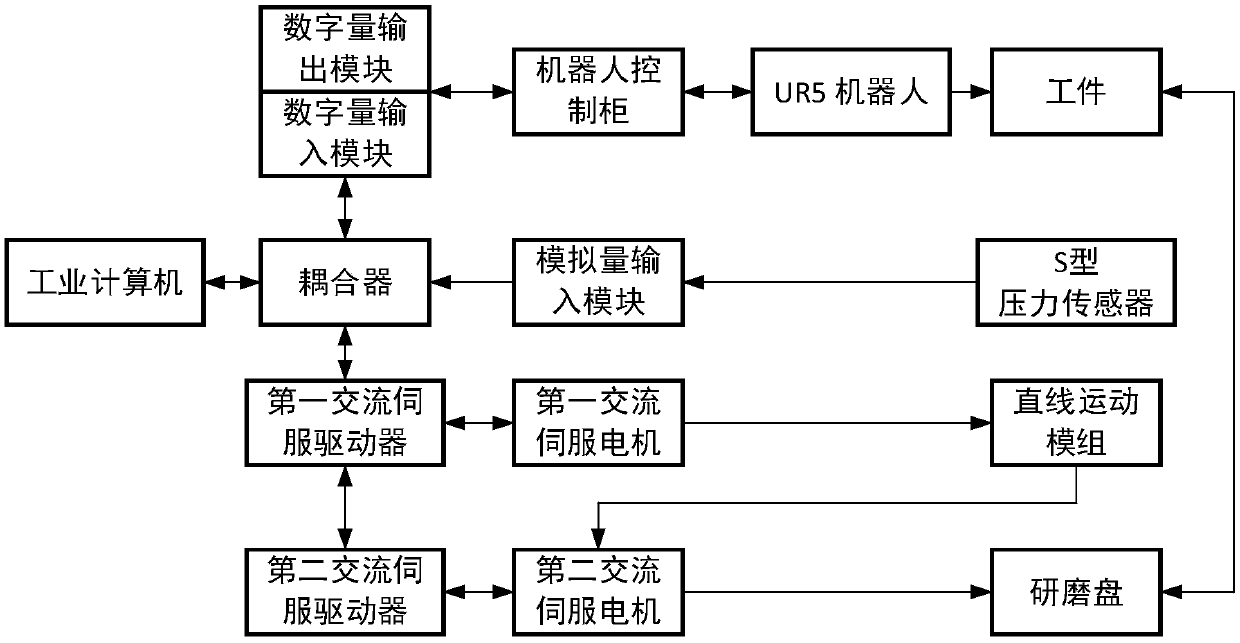
[0055] Such as figure 1 As shown, a constant force grinding control system mainly includes: industrial robot UR5, robot control cabinet, workpiece, grinding disc, first AC servo motor, second AC servo motor, linear motion module, first AC servo driver, A second AC servo driver, an S-type pressure sensor, an analog input module, a digital input module, a digital output module, a coupler, and an industrial computer;
[0056] Working principle: The industrial robot UR5 moves according to the pre-programmed program, and drives the workpiece fixedly connected to the end effector to perform grinding and feeding motion. The main grinding motion is the constant-speed rotation motion of the grinding disc driven by the second AC servo motor. The position of the second AC servo motor and the grinding disc forms a grinding platform. The relative displacement between the grinding platform and the workpiece is determined by the linear motion module driven by the first AC servo motor. The ex...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Size | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More