

Mechanical arm safety collision strategy based on external force observer
A technology of manipulator and observer, which is applied in the field of safety collision strategy of manipulator based on external force observer, can solve the problem of false detection of the robot, small transfer function gain cannot guarantee accuracy and speed, increase the cost of the robot and the complexity of wiring and other issues to achieve the effect of improving accuracy and real-time performance, reducing development costs and wiring complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the examples and drawings, but the embodiments of the present invention are not limited thereto.
[0033] The invention provides a safety collision strategy of a manipulator based on an external force observer (referred to as a safety collision strategy of a manipulator).
[0034] collision strategy), which specifically includes the following steps:
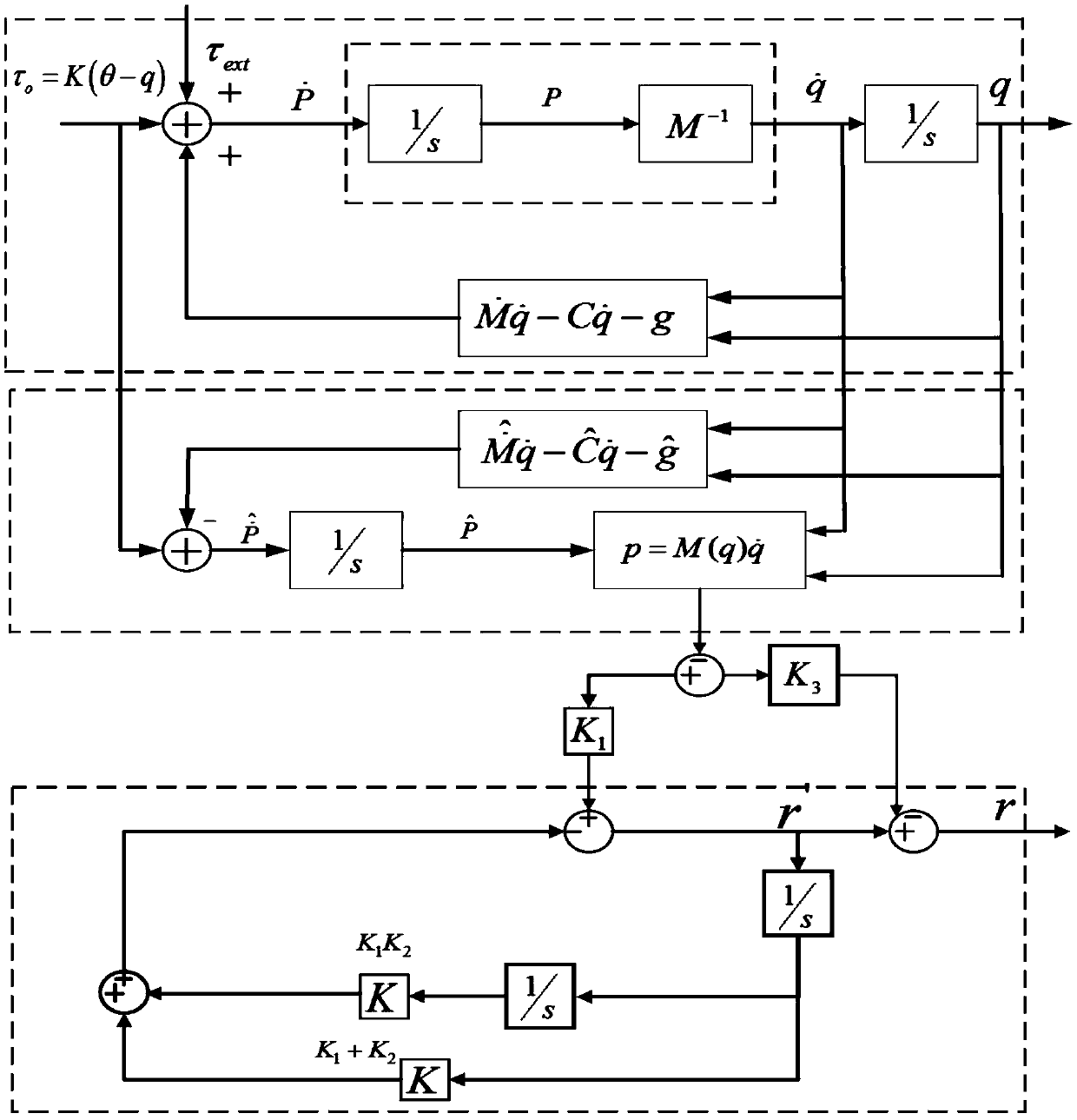
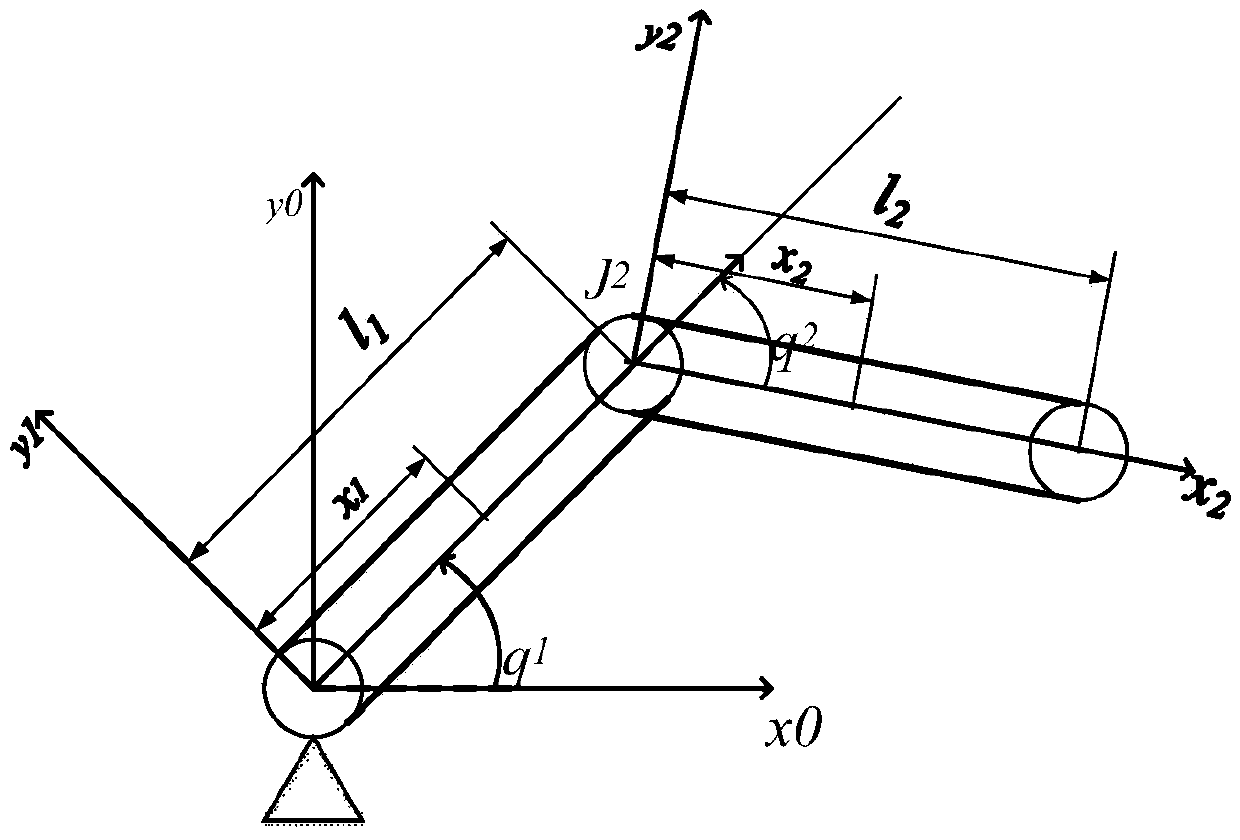
[0035] Step 1: Establish a dynamic model of the manipulator using the Lagrangian function;
[0036] Step 2: Establish a dynamic model of the flexible joint manipulator under external force interference, and perform force analysis on it;
[0037] Step 3: Collect the angle θ of the motor end, the angle q of the end of the connecting rod and the angular velocity of the end of the connecting rod by using the double encoder method
[0038] Step 4: Input the motor end angle θ and connecting rod end angle q obtained in step 3 into the dynamic model of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More