

Automatically recognized running path planning method for electromobile based on operation of computer
A technology for electric vehicles and route planning, applied in computer components, calculation, design optimization/simulation, etc., can solve problems such as large monitoring range, time confusion of video files, deviation of accuracy and stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
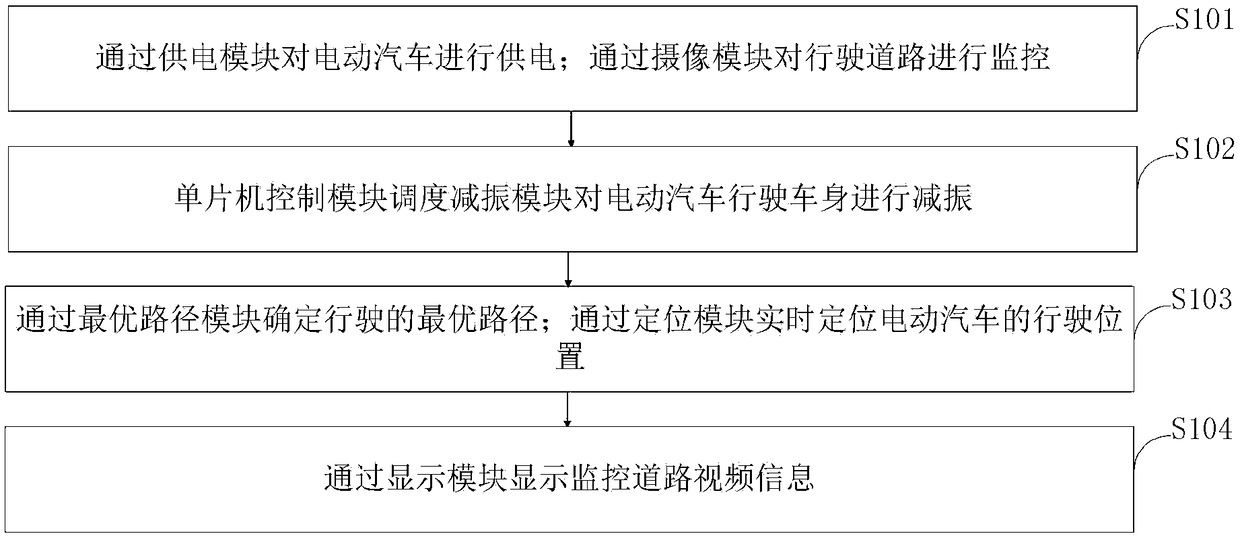
[0086] Such as figure 1 As shown, the computer-based automatic identification and operation route planning method for electric vehicles provided by the embodiments of the present invention includes the following steps:
[0087] S101, supplying power to the electric vehicle through the power supply module; monitoring the driving road through the camera module;
[0088] S102, the single-chip microcomputer control module dispatches the vibration reduction module to perform vibration reduction on the driving body of the electric vehicle;
[0089] S103, determine the optimal route for driving through the optimal route module;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More