

Two-dimensional laser radar point cloud data processing method and dynamic robot posture calibration method
A two-dimensional laser radar and laser radar technology, which is applied in image data processing, instruments, image analysis, etc., can solve the problems of inconsistent data storage format and difficult guarantee of data accuracy, and achieve high efficiency and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
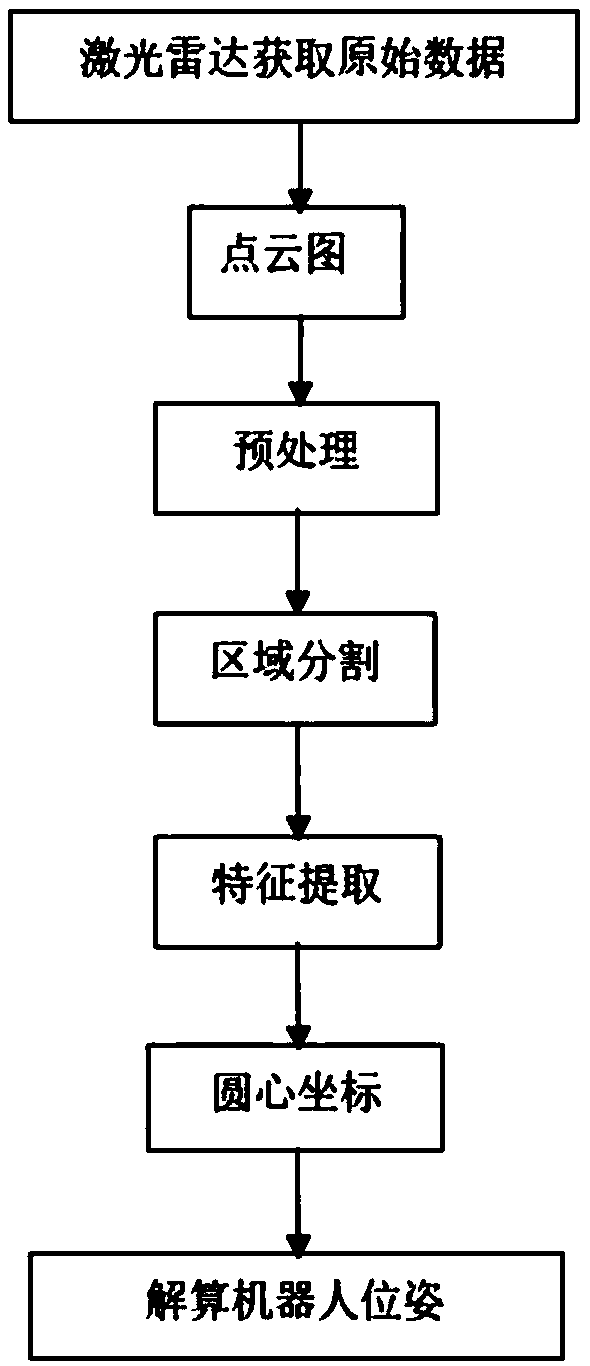
[0021] see figure 1 , the two-dimensional lidar point cloud data processing method of the present invention, the original data of the environment collected by the lidar scanning is firstly subjected to point cloud data preprocessing, and the polar coordinate system with the lidar as the coordinate point is converted into a robot pose calibration. Cartesian coordinate system, and then use area segmentation algorithm, feature extraction algorithm, point cloud segmentation algorithm, two-dimensional laser radar and camera fusion detection algorithm to realize effective detection and recognition of environmental information, the process includes:
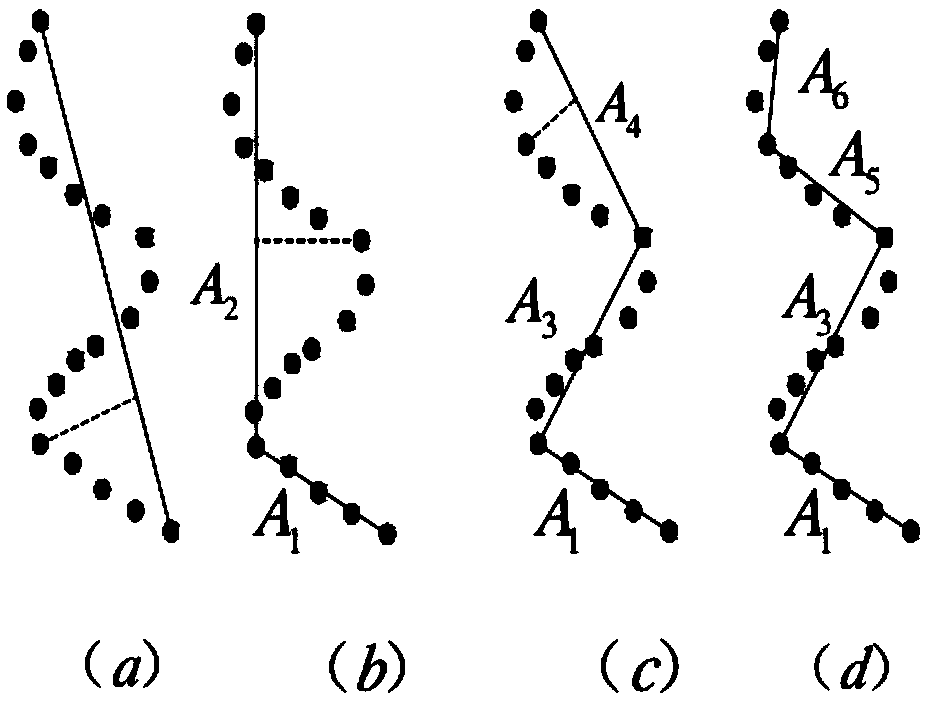
[0022] The use judgment method of the described area segmentation algorithm is: if the distance between two consecutive scanning points is less than a certain threshold, then these two scanning points are attributed to the same block; comparing two consecutive scanning points, if their distance If it is greater than a certain threshold,...
Embodiment 2
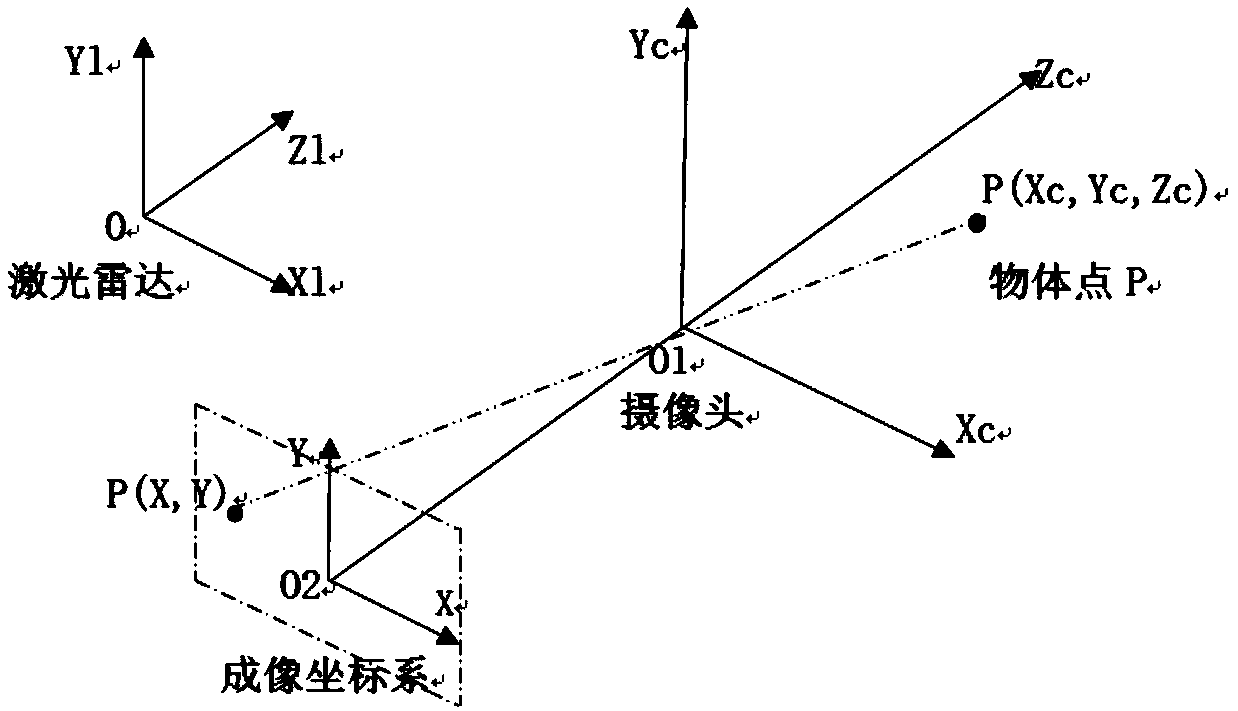
[0026] see figure 1 , figure 2 The difference between the two-dimensional laser radar point cloud data processing method of this embodiment and Embodiment 1 is that: the point cloud data preprocessing algorithm includes a filtering algorithm, removing abnormal values and coordinate transformation; filtering algorithm, removing abnormal values The value can effectively eliminate the interference information in the environment; the coordinate transformation converts the polar coordinate system with the lidar as the coordinate point into the rectangular coordinate system used for robot pose calibration;
[0027] 1) The filtering algorithm adopted is as follows:
[0028] Due to the interference of the environment, the scan data returned by the lidar includes noise. Noise can be effectively eliminated by using an appropriate filtering algorithm. The median filter with a selected window width of 7 can effectively filter out the noise in the discrete point cloud data and retain...
Embodiment 3
[0037] see figure 1, the two-dimensional lidar point cloud data processing method of the present embodiment is different from embodiment 2 in that: the region segmentation algorithm, when a certain scanning point A is D from the lidar center point O, set The segmentation distance threshold is d, and when the scanning point is 3D away from the lidar center, the threshold is adjusted to 3d; according to the actual application, a nonlinear function can also be used to define the adaptive segmentation threshold; the area segmentation algorithm used is as follows:
[0038] a. Calculate the distance between two consecutive points in the point set
[0039]
[0040] b. Judging the relationship between Dj and threshold θ,
[0041] If Dj, is greater than the threshold θ, the point (x, y) is considered to be the segmentation point of the two regions, and the selection of the threshold is generally in accordance with the dynamic threshold. After following the above steps step by step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More