

Inertial control active suspension control system and control method based on vehicle posture deviation
An active suspension and control system technology, which is applied in vehicle suspension/shock absorbing mechanism testing, vehicle springs, elastic suspensions, etc., can solve problems such as complex design process and failure to consider simultaneous design, so as to increase driving speed and reduce vibration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] Embodiment 1: Inertial regulation and active suspension control system of three-wheeled vehicle
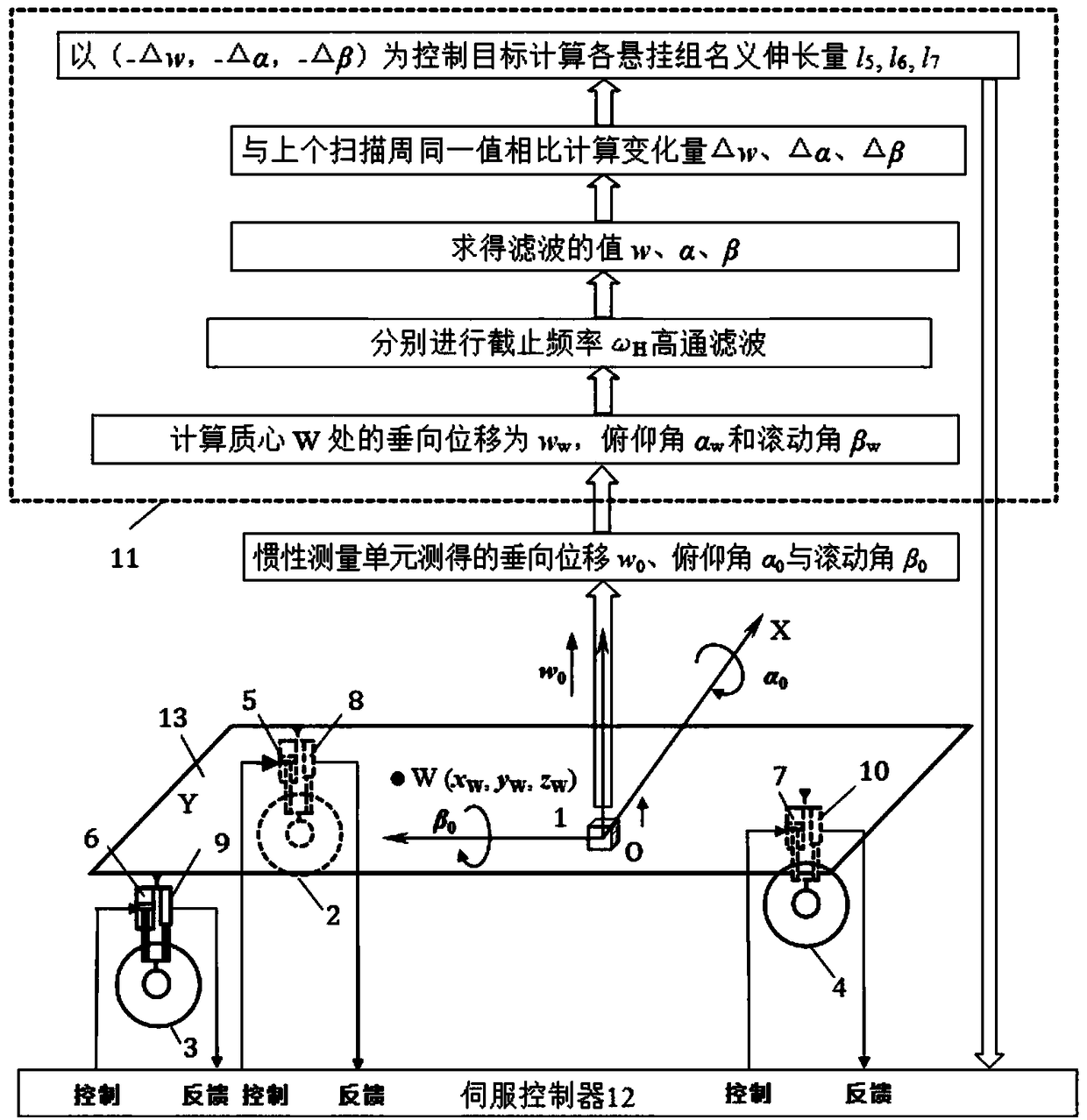
[0040] Such as figure 1 As shown, the system includes: car body 13, inertial measurement unit 1, wheels 2, 3, 4 and suspension servo actuating oil cylinders 5, 6, 7 corresponding to the wheels one by one and corresponding displacement sensors 8, 9, 10, electric Control unit 11 and servo controller group 12. The inertial measurement unit 1 is fixed on the car body 13, the wheels 2, 3, and 4 are respectively connected to the lower part of the car body through the suspension servo actuation cylinders 5, 6, and 7, and the displacement sensors 8, 9, and 10 are respectively used to measure the suspension servo action. The strokes of the hydraulic cylinders 5, 6, and 7, the electronic control unit 11 and the servo controller group 12 are fixed on the car body, and the electronic control unit 11 is connected with the inertial measurement unit 1 and the servo controller group 12. T...
Embodiment 2
[0051] Embodiment 2: Inertial regulation active suspension control system of four-wheel vehicle
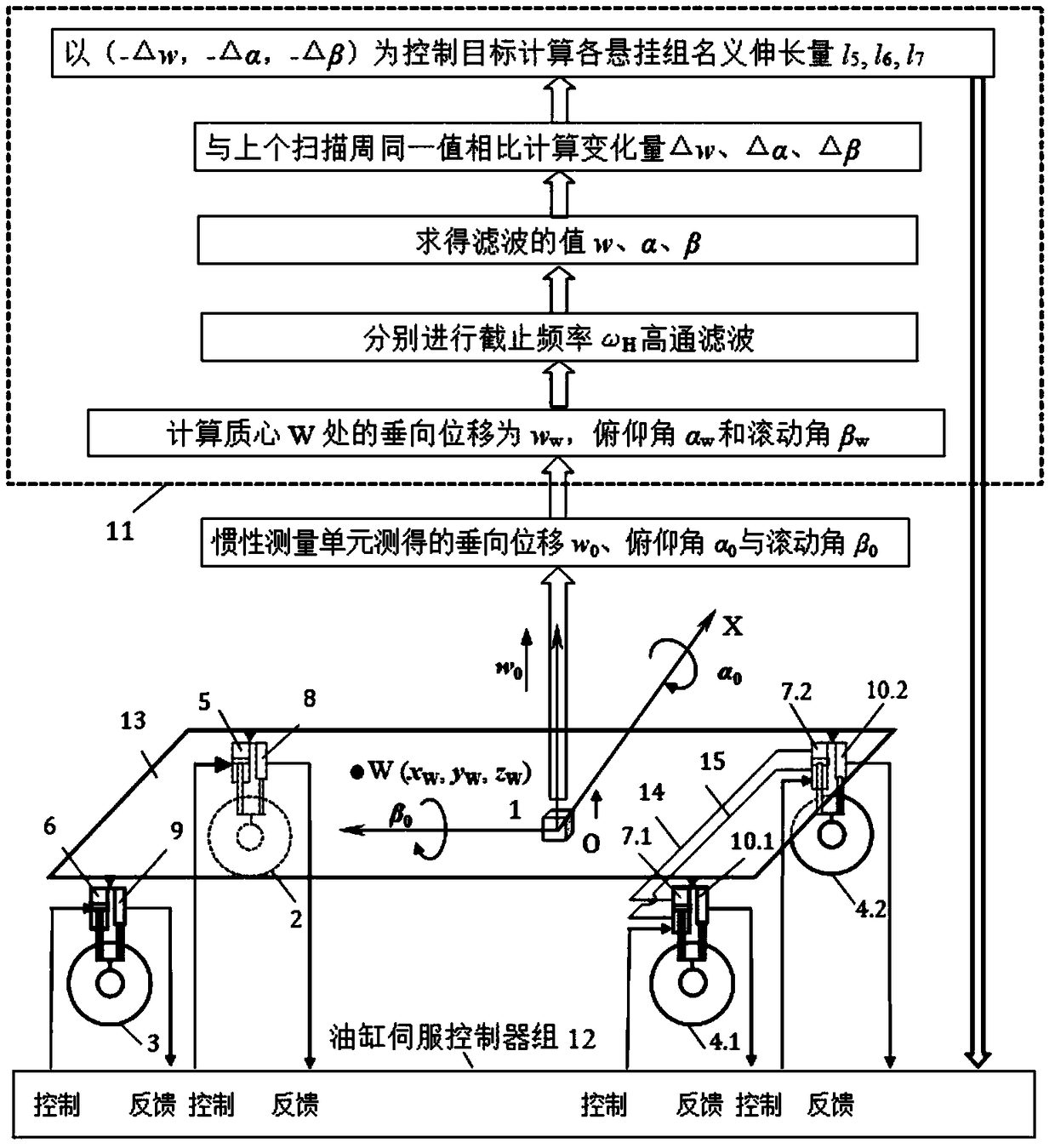
[0052] Such as image 3 As shown, the system includes: car body 13, inertial measurement unit 1, wheels 2, 3, 4.1, 4.2 and suspension servo cylinders 5, 6, 7.1, 7.2 corresponding to the wheels one by one and corresponding displacement sensors 8, 9 , 10.1, 10.2, the electric control unit 11 and the servo controller group 12. The inertial measurement unit 1 is fixed on the car body 13, the wheels 2, 3, 4.1, 4.2 are respectively connected to the bottom of the car body through the suspension servo actuating cylinders 5, 6, 7.1, 7.2, and the displacement sensors 8, 9, 10.1, 10.2 are respectively For measuring the stroke of suspension servo actuating oil cylinders 5, 6, 7.1, 7.2, the electronic control unit 11 and the servo controller group 12 are fixed on the vehicle body, the electronic control unit 11 and the inertial measurement unit 1 and the servo controller group 12 communicati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More