

Simultaneous positioning and mixed map construction method for dynamic parking environment
A hybrid map and construction method technology, applied in image analysis, image data processing, measuring devices, etc., can solve the problems of low parking efficiency and inability to reuse, and achieve the effects of long residence time, improved efficiency, and improved positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030] Embodiment 1. A panoramic stereo vision SLAM method for a dynamic parking environment.
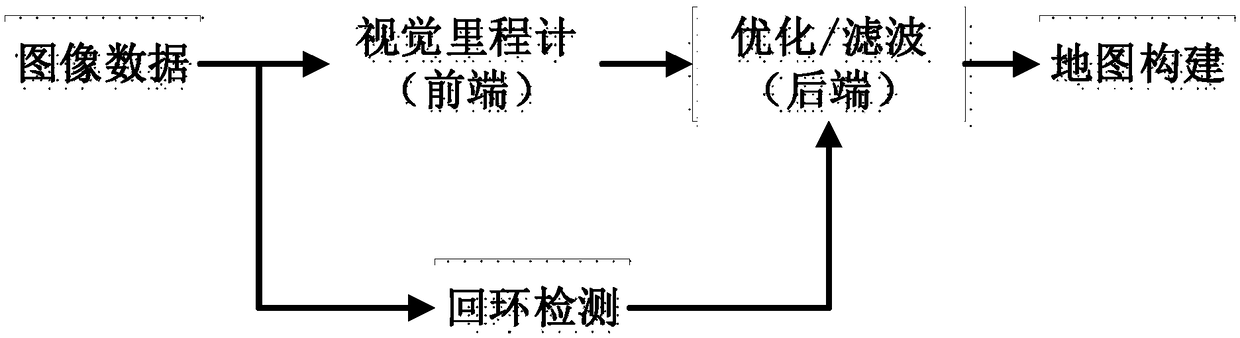
[0031] figure 2 It is the system architecture of the current mainstream SLAM method, which is divided into data image, visual odometry, back-end optimization, map construction and loop detection modules. In terms of data input, currently monocular cameras, binocular cameras, and RGB-D cameras are mainly used. Among them, binocular cameras are widely used in unmanned driving technology because of their accurate scale information; in the visual odometer module, according to the implementation method The difference can be divided into two categories, one is the feature point method based on image feature extraction, and the other is the direct method based on image gray level change. The feature point method extracts the corner points or spots with obvious grayscale changes in the image and calculates their corresponding descriptors, and then uses epipolar geometry or projective geom...
Embodiment 2
[0036] Embodiment 2. A method for constructing a topological map of a parking lot environment.
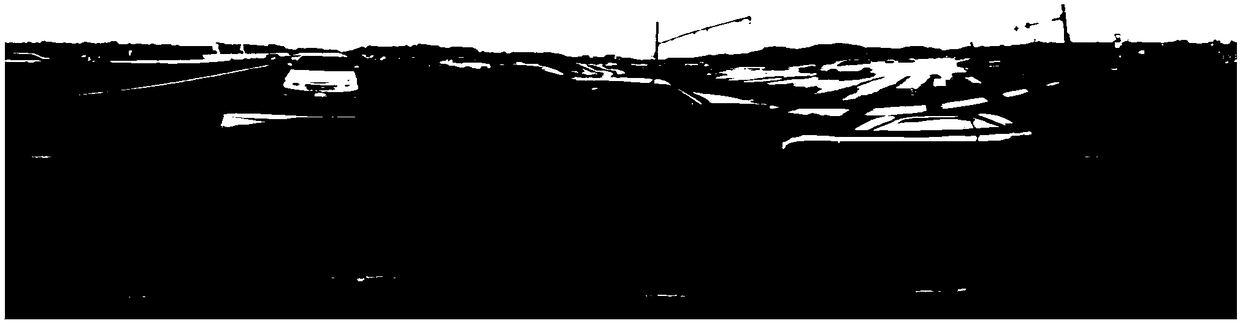
[0037] image 3 For the panoramic image and its disparity map obtained by using the omni panoramic stereo camera, since the binocular camera can directly obtain the actual coordinates of the three-dimensional objects in the environment according to the binocular dense matching method, it is easy to construct Figure 4 The 3D dense point cloud map shown in , the 3D dense point cloud map is obtained by calculating the position in the 3D space corresponding to each pixel in the image. However, due to the large space occupied by the original three-dimensional grid and low storage efficiency, many scholars have applied some efficient data structures in the process of composition. The more famous work includes Octomap using the octree structure. Figure 5 The map shown in is the octree map, and the raster map is obtained by rasterizing the 3D dense point cloud map.
[0038] Further, af...
Embodiment 3
[0043] Embodiment 3, a method for extracting semantic information of a parking lot environment and constructing a hybrid map.
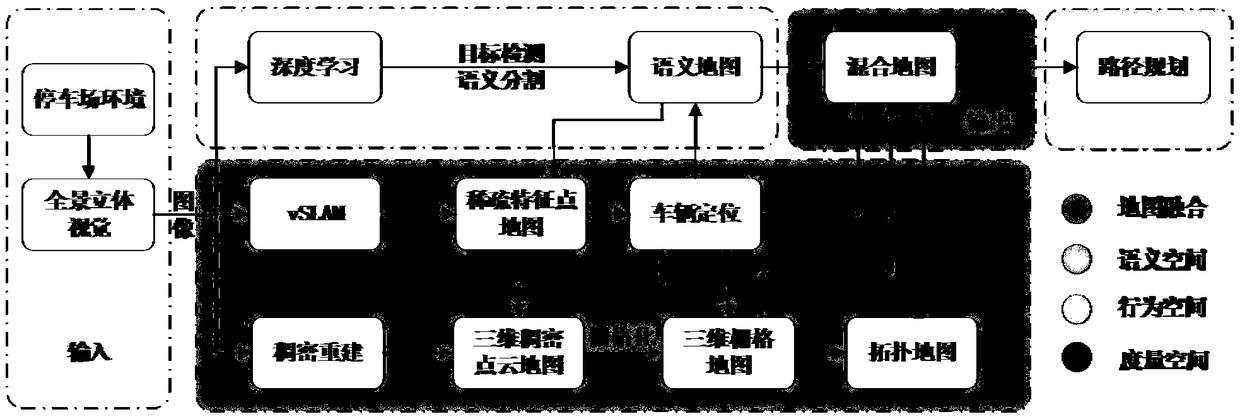
[0044] Figure 7 In is the semantic information of the parking lot extracted by deep learning algorithms such as semantic segmentation and target detection. Different colors can be used to represent buildings, roads, vehicles, parking spaces or lane lines. The semantic map of the environment can be constructed by using this semantic information combined with the previously obtained vehicle pose, environmental disparity map, etc. Semantic information will also be used for data fusion and removal of dynamic targets in the feature point map. Finally, the 3D grid map, topological map and semantic map are fused to construct a topological-semantic hybrid map that can be used for vehicle route planning and navigation.
[0045] At present, there are two main methods for extracting semantic information using deep learning architectures: target recognition an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More