

Obstacle identification and ranging system and method for roller construction process
An obstacle identification and distance measurement system technology, which is applied in the field of obstacle identification and distance measurement system for the construction process of road rollers, can solve the problems of low measurement accuracy and inaccurate obstacle identification, and achieve strong anti-interference ability and excellent real-time performance , The effect of high accuracy of obstacle position measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
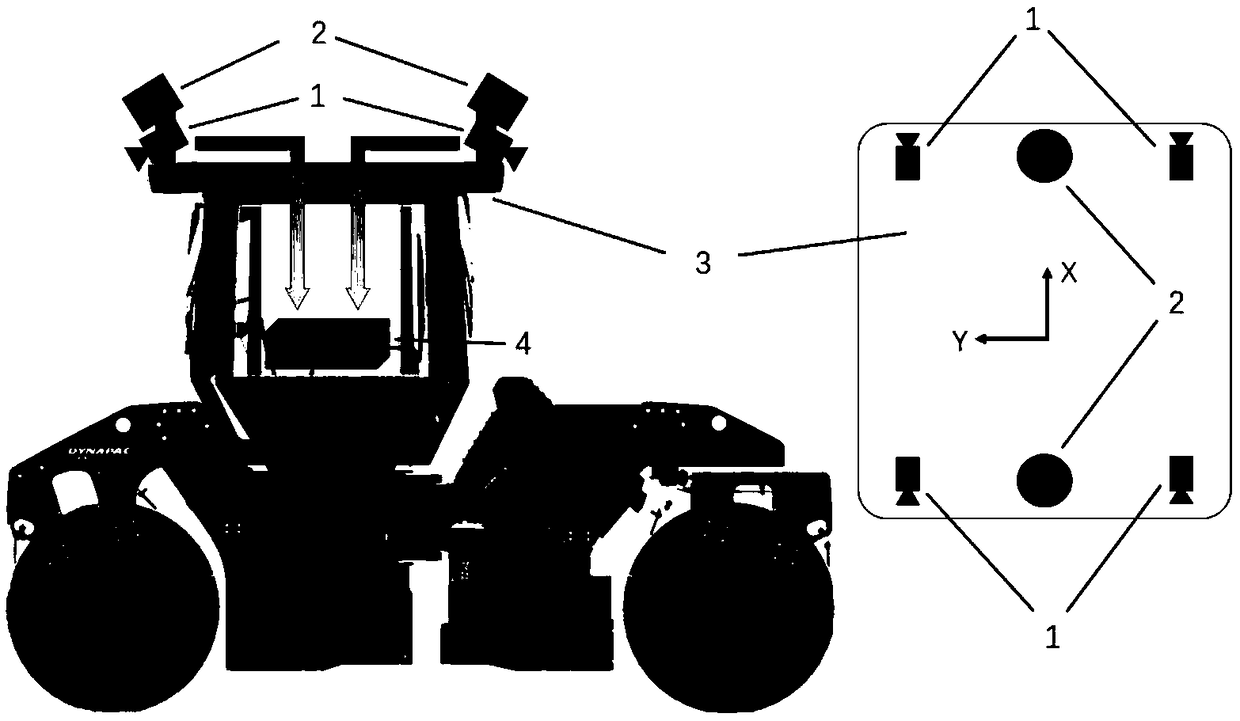
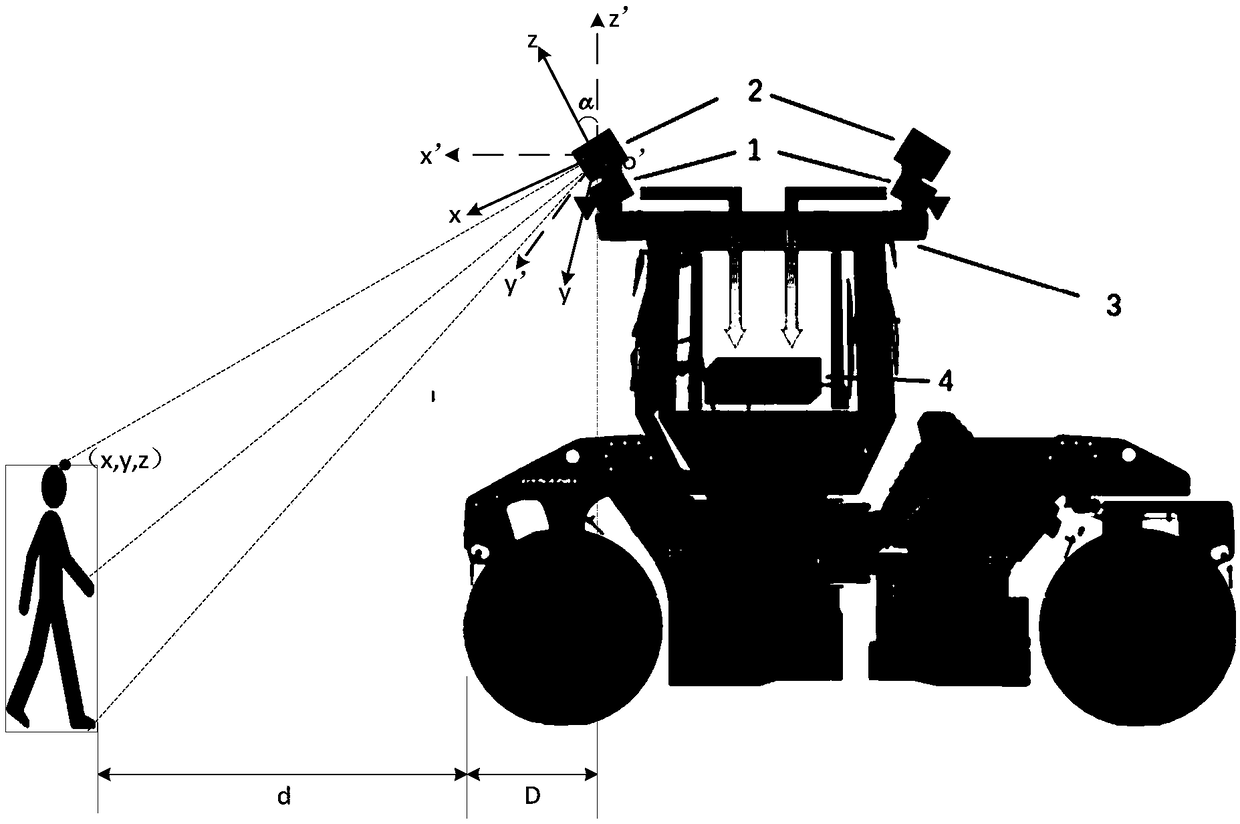
[0018] Such as Figure 1-3 As shown, the obstacle recognition and ranging system for the roller construction process includes two 16-line laser radars, four industrial cameras and an embedded industrial computer connected to the roller construction instructions. An industrial computer 2 is installed in the cockpit of the road roller 1, and an industrial camera 3 for obtaining image information of the construction area of the road roller is installed around the top of the cockpit of the road roller. The camera and the laser radar are respectively connected to the industrial computer through the expansion network port of the industrial computer, and the inter-node communication is established between the camera and the laser radar through the Robot Operating System (ROS) system.
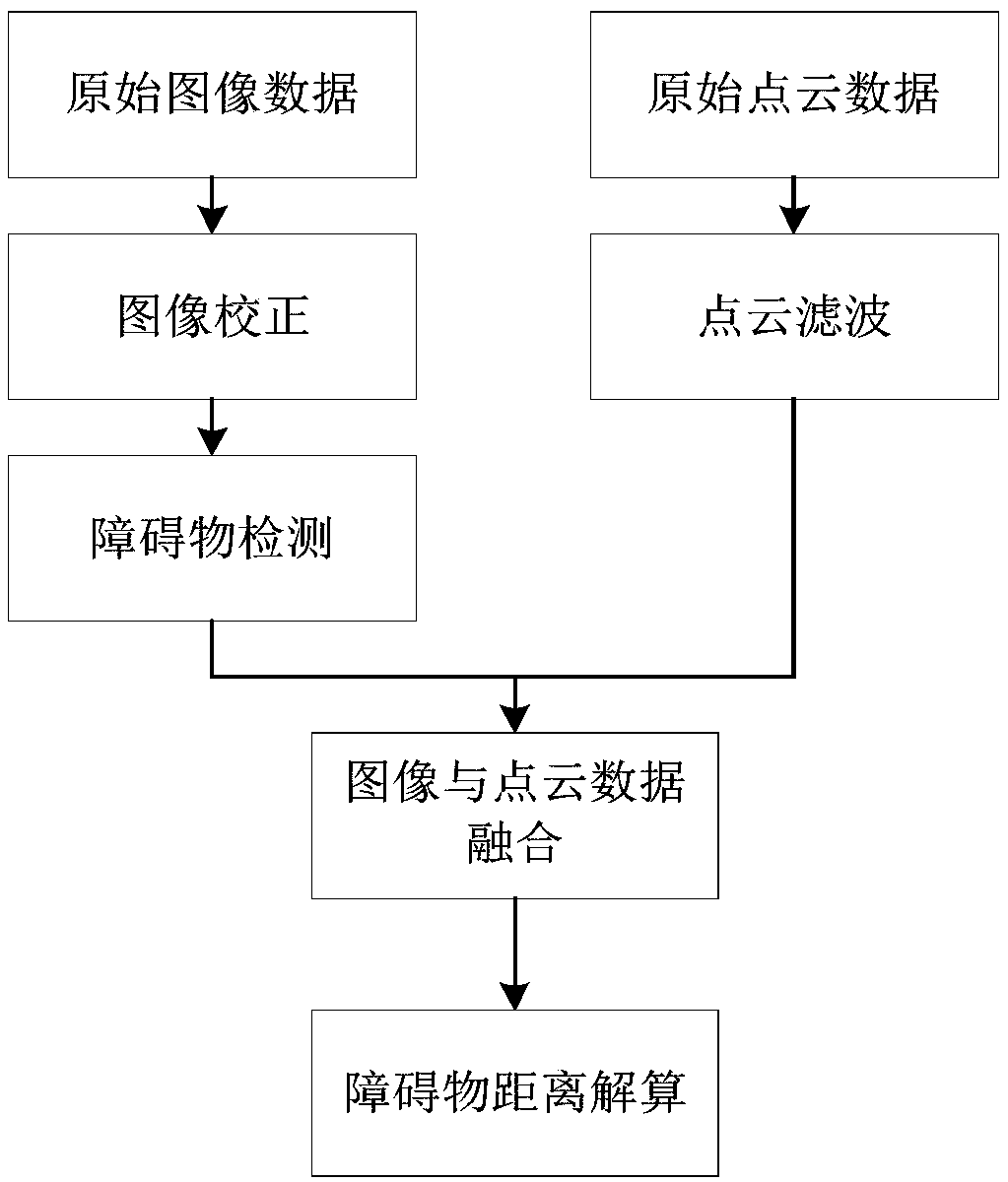
[0019] Using the distance measurement method of this system, firstly, the image data of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More