

Intelligent power plant autonomous polling robot polling system and method
An inspection robot and inspection system technology, which is applied in the direction of collectors, electric vehicles, electrical components, etc., to achieve the effects of improving safety, improving inspection efficiency and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
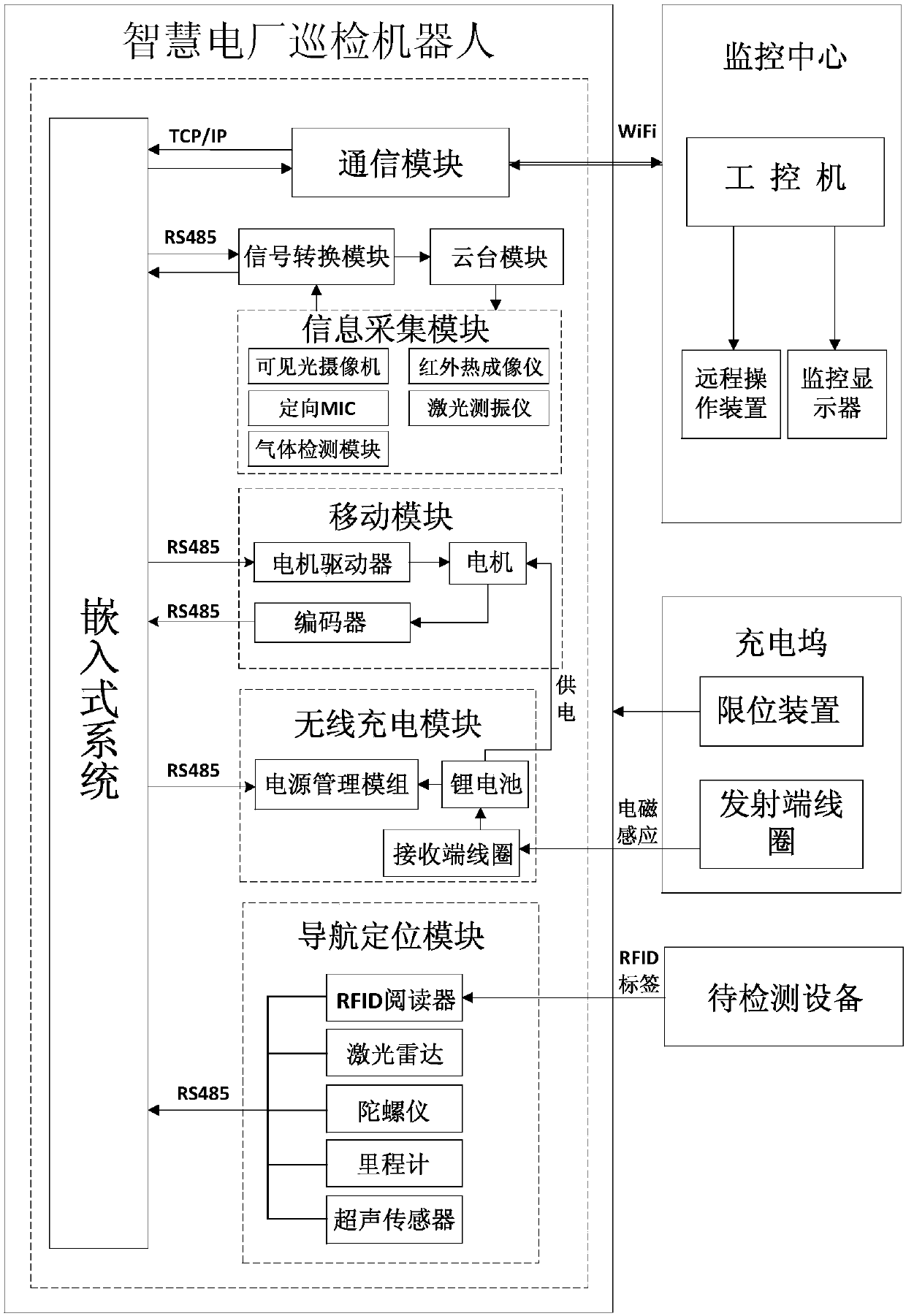
[0042] Such as figure 1 Shown is the structural diagram of the autonomous inspection robot inspection system of the smart power plant of the present invention, including an embedded system, a mobile module, a navigation and positioning module, a wireless charging module, a pan-tilt module, an information collection module, and a communication module.
[0043] The embedded system is used as a core controller for robot control and signal processing.
[0044] The mobile module uses a four-wheel drive mobile platform as a mobile carrier to carry each module, and the embedded control system independently controls four DC servo motors through the 485 serial port, so that the robot can move flexibly;
[0045] The navigation and positioning module includes an RFID reader, a two-dimensional laser radar, a gyroscope, an odometer, and an ultrasonic sensor, and is connected to an embedded system through a 485 serial port. Two-dimensional laser radar scans the surrounding environment to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More