

ICU ward horizontal-type bilateral cerebral palsy lower limb rehabilitation robot with functions of communication and autonomous navigation movement
A rehabilitation robot and autonomous navigation technology, applied in passive exercise equipment, informatics, sports accessories, etc., can solve the problems of adjusting rehabilitation training plans, unable to monitor patients' rehabilitation in real time, increasing the labor force of medical staff, etc., to save human resources Cost, ease of query and tracking, and the effect of improving space utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
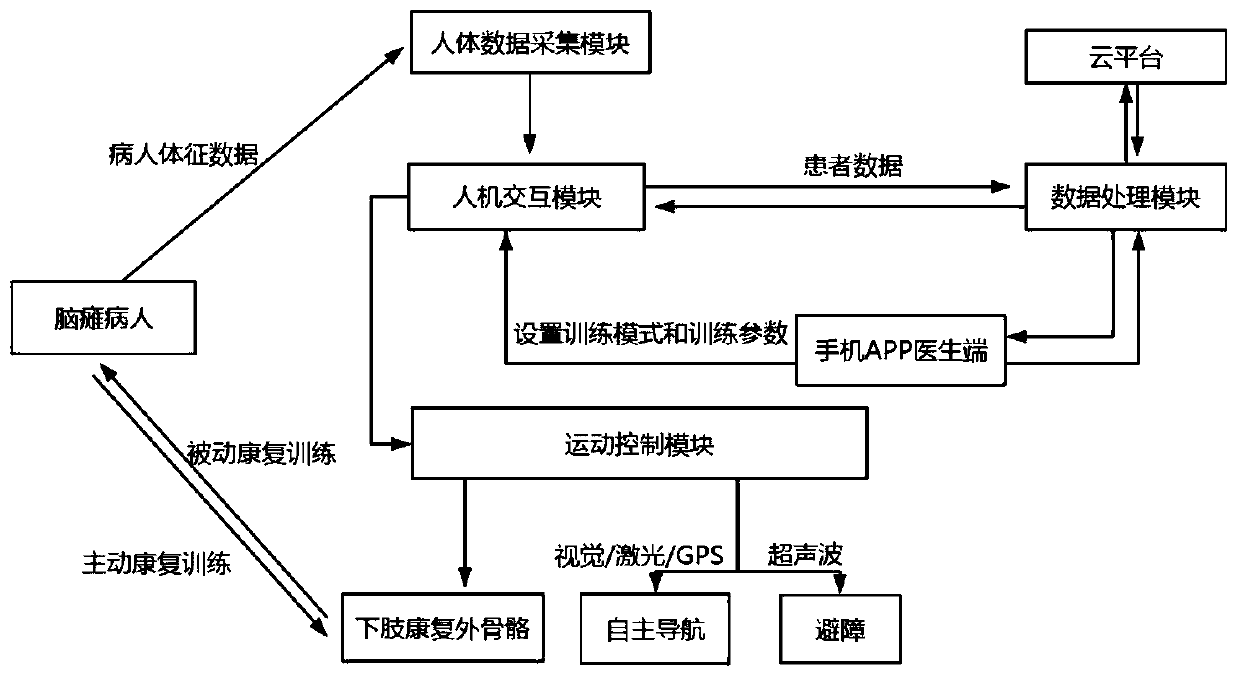
[0034] Before the rehabilitation training starts, the user needs to register and enter the login interface of the rehabilitation evaluation system, and enter the login name and password; after successful login, enter the rehabilitation evaluation interface, which includes serial communication module information, rehabilitation evaluation module information, control system information and other information , medical staff conduct a preliminary analysis of the patient's recovery by observing the information displayed on the interface.
[0035] Based on the measurement data and evaluation results, the rehabilitation evaluation system can automatically give the patient's lower limb rehabilitation exercise training plan; the attending doctor can also formulate the patient's lower limb rehabilitation exercise training according to the comprehensive data such as the rehabilitation evaluation result, the last exercise time and angle sorted out by the system Program, and set the exercis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More