Electric vehicle NVH optimization-based driving control method
A technology for electric vehicles and controllers, which is used in motor generator control, AC motor control, electronic commutation motor control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
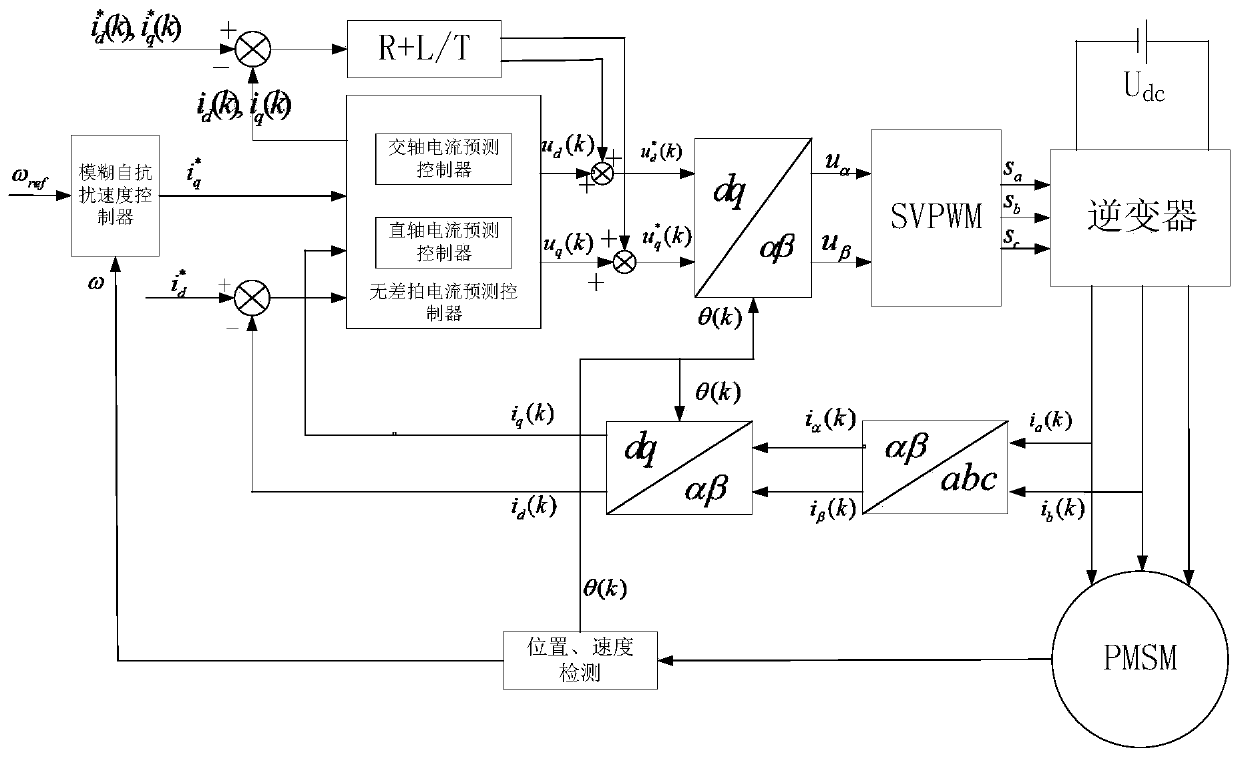
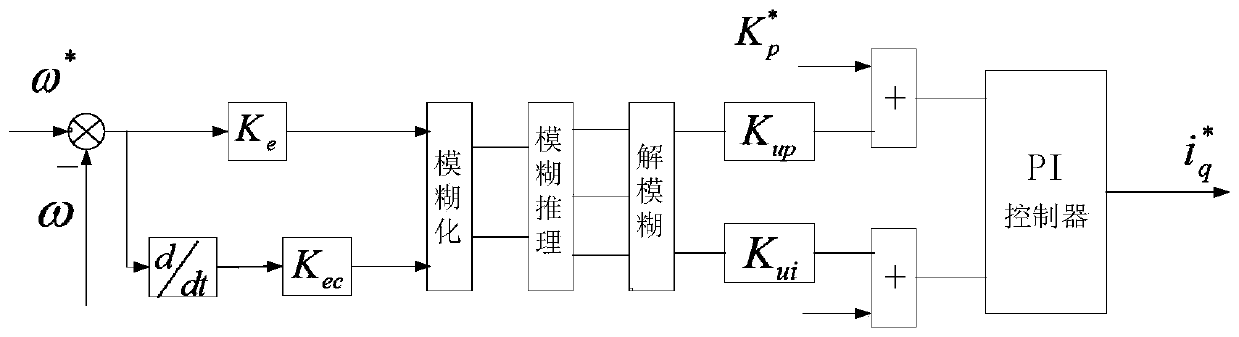
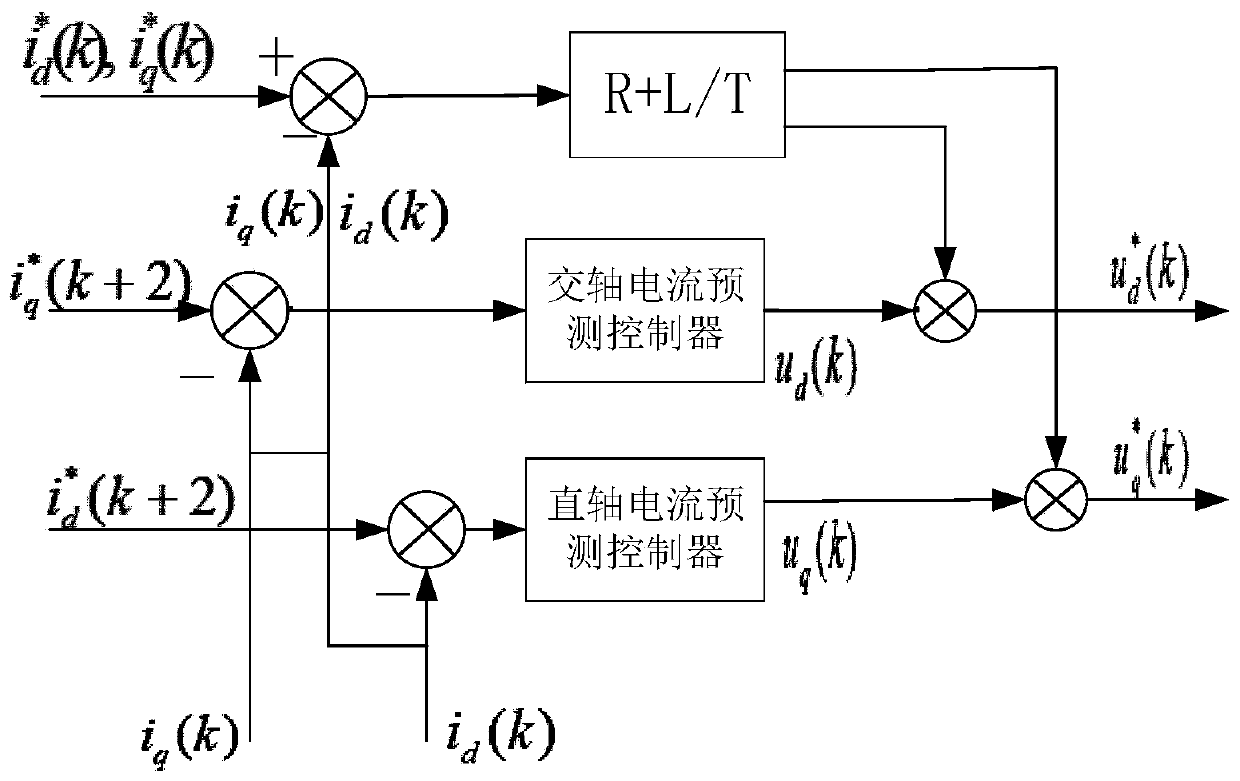
[0046] A control method based on optimizing the NVH performance of electric vehicles, the control block diagram is as follows figure 1 As shown; by optimizing the traditional control strategy, the rules of fuzzy control are introduced into the speed loop PI controller, and its schematic diagram is shown in figure 2 As shown, better speed regulation performance and better anti-disturbance performance; and the concept of predictive control is introduced into the current loop, and the dead zone compensation is introduced into the new predictive current controller. The schematic diagram is as follows image 3 As shown, by compensating the voltage, better current characteristics can be obtained, thereby suppressing the torque ripple, and optimizing the NVH of the electric vehicle;
[0047] Now in conjunction with accompanying drawing, the invention of this paper is described in detail as follows:
[0048] Step 1: According to the given speed and the actual speed obtained by the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More