

Elephant trunk-like flexible mechanical arm
A flexible robotic arm and elephant trunk technology, applied in the field of robotics, can solve the problems of affecting positioning accuracy, high cost, and slow response speed, and achieve the effect of simple and compact structure, improved stability and motion accuracy, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
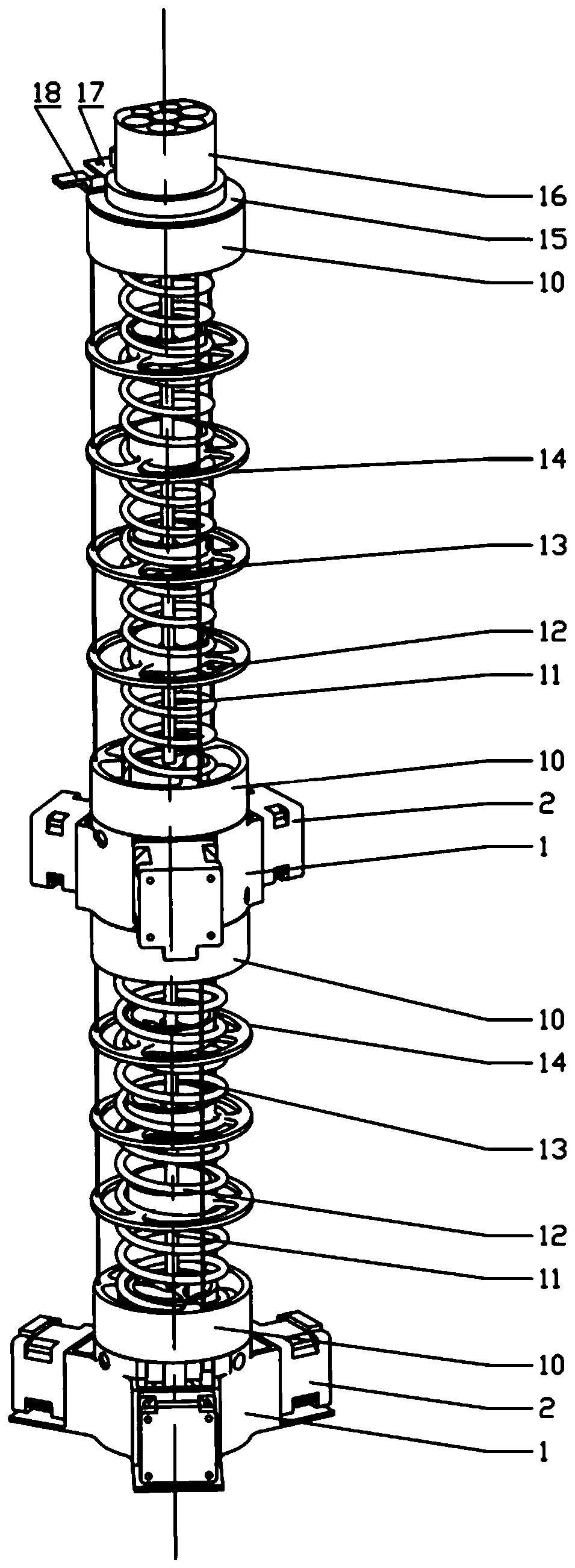
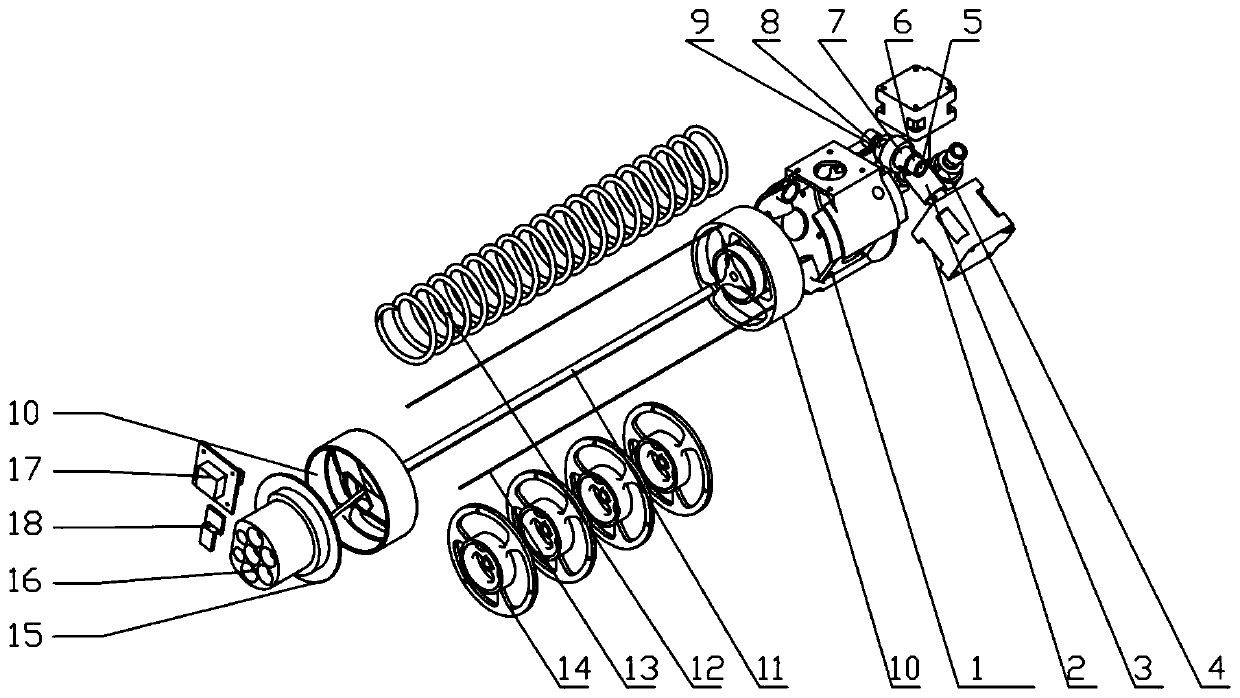
[0048] In this embodiment, two trunk-like robotic arm units are used in series, the second drive unit support 1 is fixed on the mobile car platform, and the charging plug is used as the end effector 16 for automatic charging of new energy vehicles.
[0049] The effective length of the compression spring 12 of the first section of the artificial trunk arm unit is 280mm, and the four guide discs 14 are evenly distributed on the neutral rod 11; The three guide discs 14 are evenly distributed on the neutral rod 11 . The pitch of the compression spring is 16mm in the free state, and the axial length of the fixing ring of the compression spring is 12mm. When the bending degree of the mechanical arm is relatively large and exceeds 90°, the axial length of the compression spring fixing ring should be appropriately increased to be equal to the pitch in the free state of the compression spring. The motor 2 used for driving uses a stepping motor to accurately control the spatial positio...
Embodiment 2
[0056] The elephant trunk flexible robotic arm can also be applied to other occasions to serve people's daily life. Use two trunk manipulator units in series, and use a pneumatic, electromagnetically controlled or motor controlled manipulator as the end effector 16 to fix the manipulator on the wall or table. After the user extracts the image features of the target object, the robot arm can be used to identify and grasp the specific object within a certain range. Other aspects are not different from Example 1.
Embodiment 3
[0058] The robotic arm can also use the camera 17 as the end effector 16 without installing other devices, and use a trunk-like robotic arm unit to monitor the surrounding environment. The monitoring range can reach a hemisphere, with a maximum of 3 / 4 sphere. Under this light load condition, if the requirements for the working space are not high, the compression spring 12 with lower rigidity and shorter length can be selected, and the number of guide discs 14 can be appropriately reduced, but it is recommended not to be less than three. When the bending angle requirement is low and the effective length of the compression spring 12 is insufficient, only two are allowed. When there is no special requirement for motion accuracy, a DC motor can be used as the drive motor 2 .
[0059] The robotic arm can be installed on a fixed platform to monitor a specific area; it can be installed on a mobile trolley platform to monitor the flow of a larger area; it can also be held by a perso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More