

Distributed dynamic modeling method for multi-leg robot
A dynamic modeling, legged robot technology, applied in the field of dynamic modeling, can solve the problems of analytically complex, inaccurate, and huge results, and achieve the effect of meeting real-time requirements, reducing complexity, and rapidly updating
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
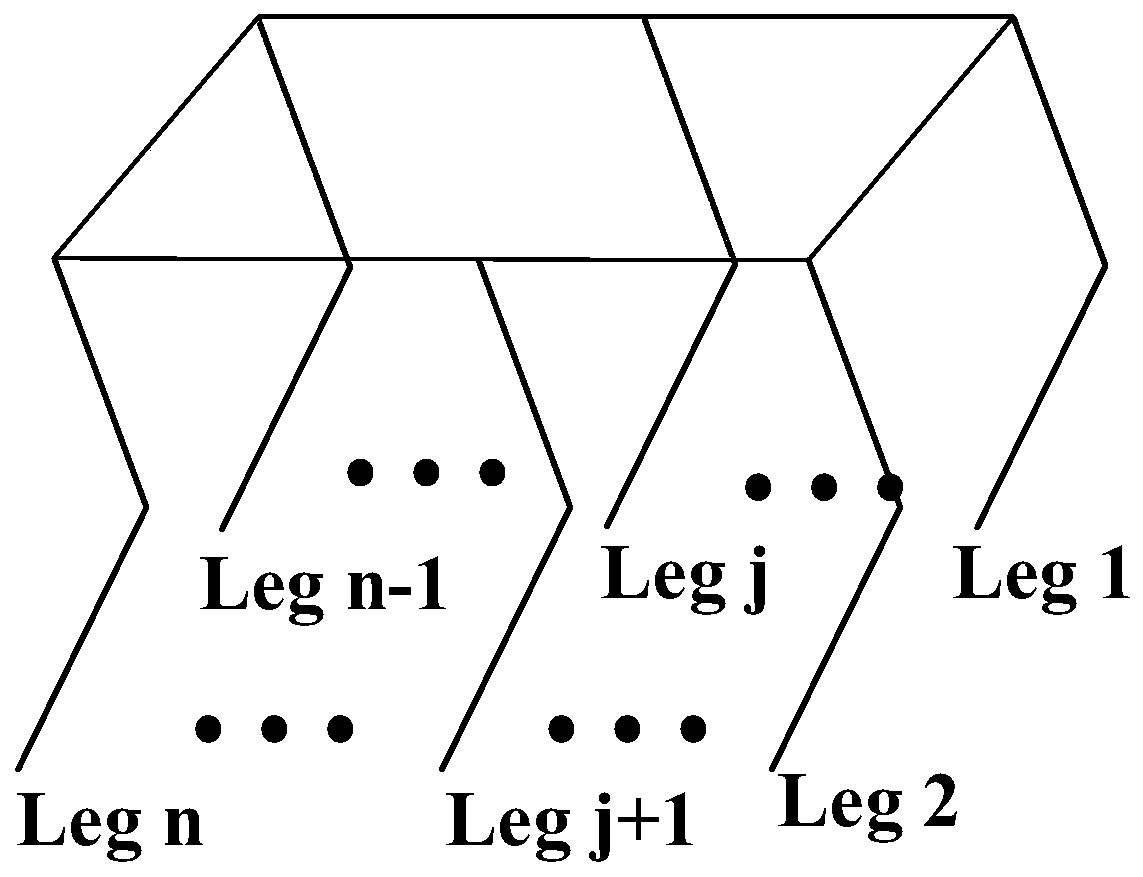
[0044] The invention proposes a distributed dynamic modeling and solving method that can be applied to a class of multi-limb-legged robots. First, in order to simplify the model complexity and modeling difficulty, a single rigid body dynamics model of the torso is established with each limb as the input of the virtual actuator. The dynamic model of each limb and leg is measured with each active joint moment as input, and the friction cone constraint is established by using the foot-ground contact force screw expression to realize the constraint on the joint moment; then, the distribution-based Dynamics control scheme.
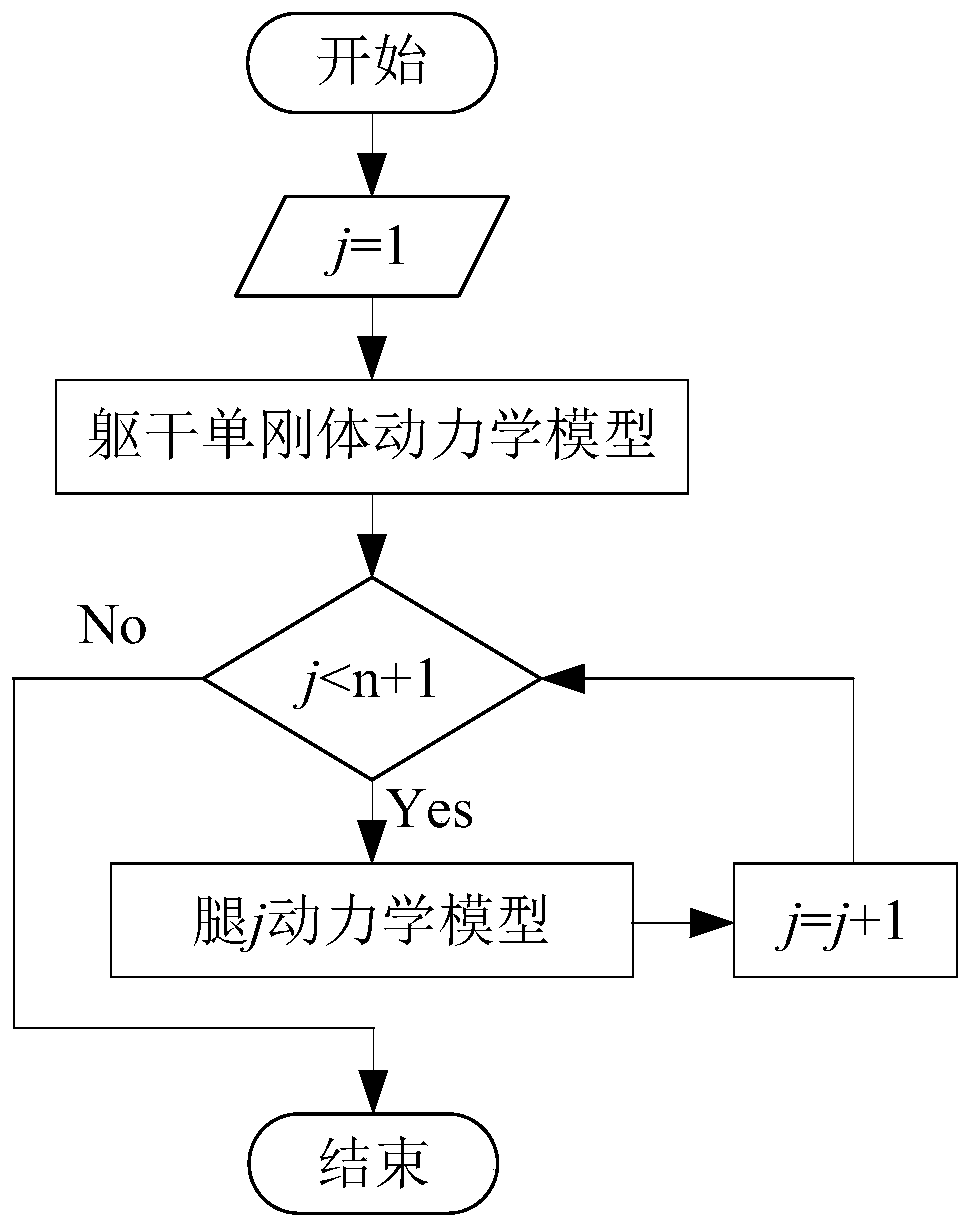
[0045] 1. Model building process, such as image 3 shown
[0046] (1) Establishment of single rigid body dynamic model of torso
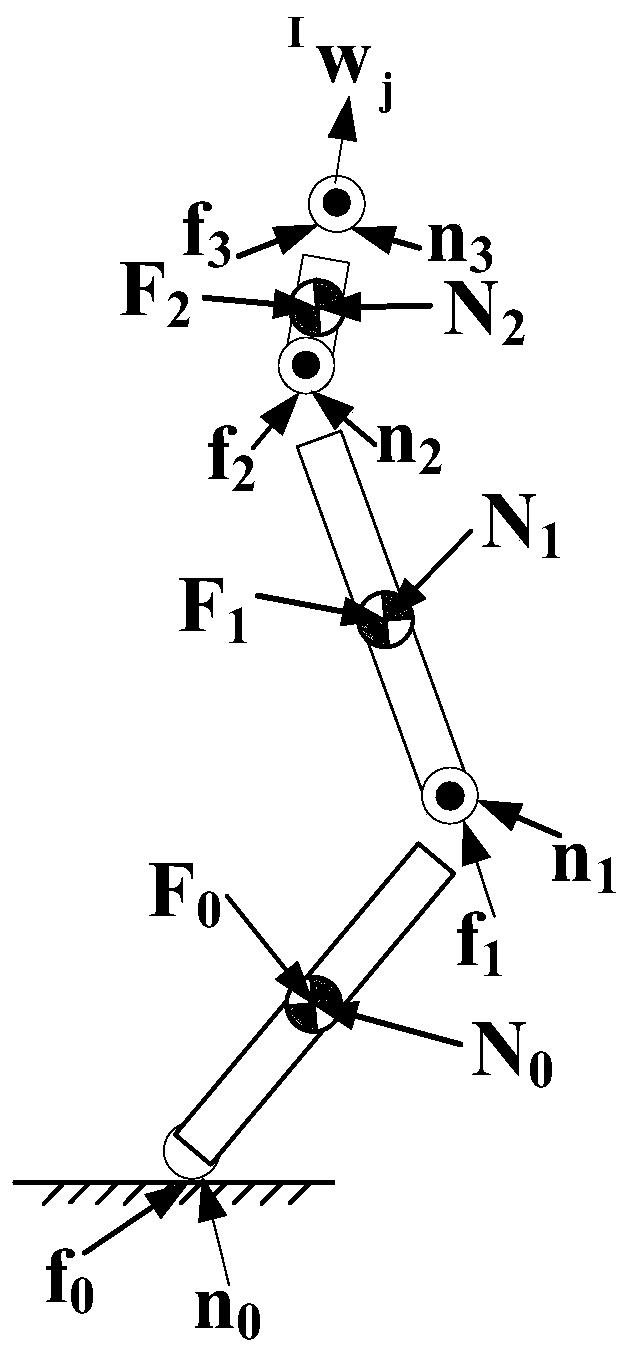
[0047] Based on the virtual model control, the single rigid body of the torso is taken as the object, the legs are simplified as virtual actuator input, the force analysis is carried out, and the dynamic model of the single rigid ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More