

Potted vegetables double self-locking grasping and shearing integrated manipulator
A technology for potted vegetables and manipulators, which is applied to manipulators, agricultural machinery and implements, harvesters, etc. It can solve problems such as the mismatch between the direction of finger force and the direction of load force, and the inability to match the direction of force with the direction of load, so as to improve grasping Load capacity, good protection effect, accurate clamping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
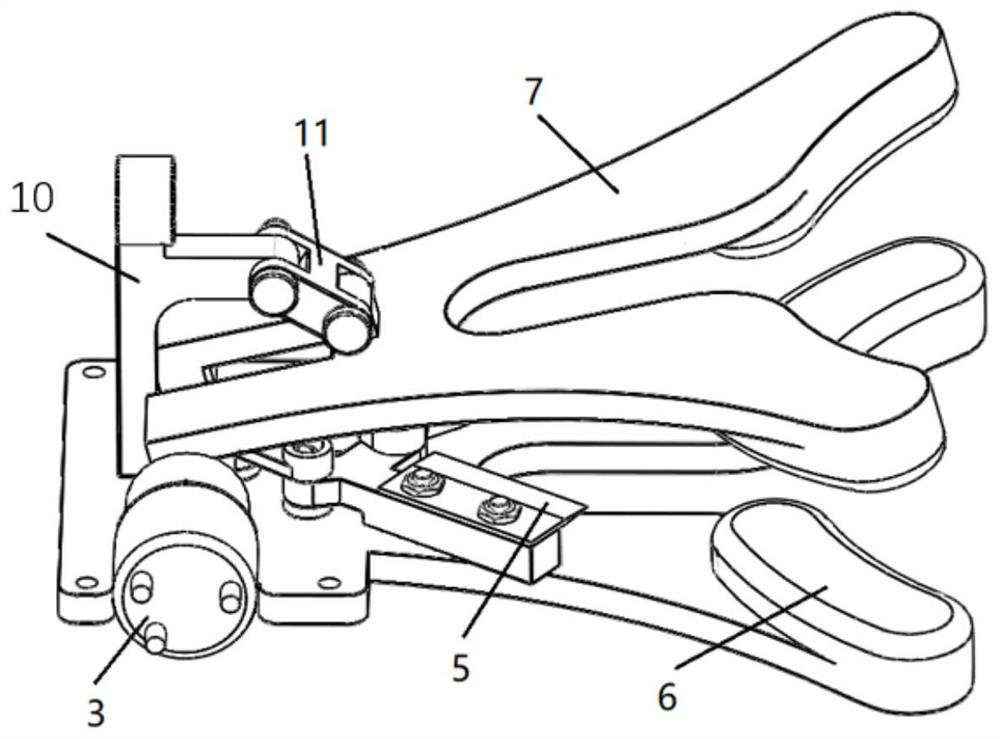
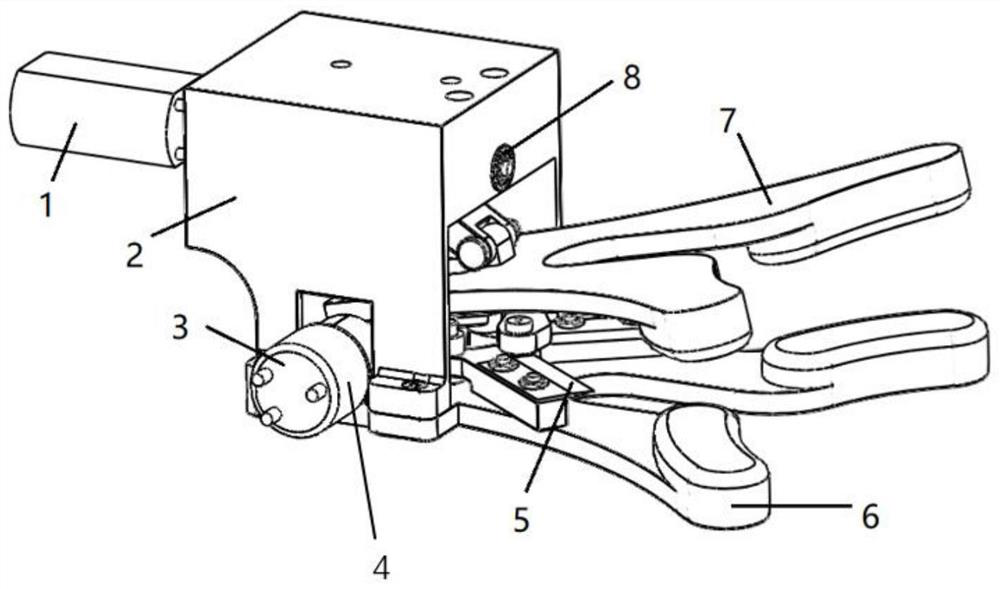
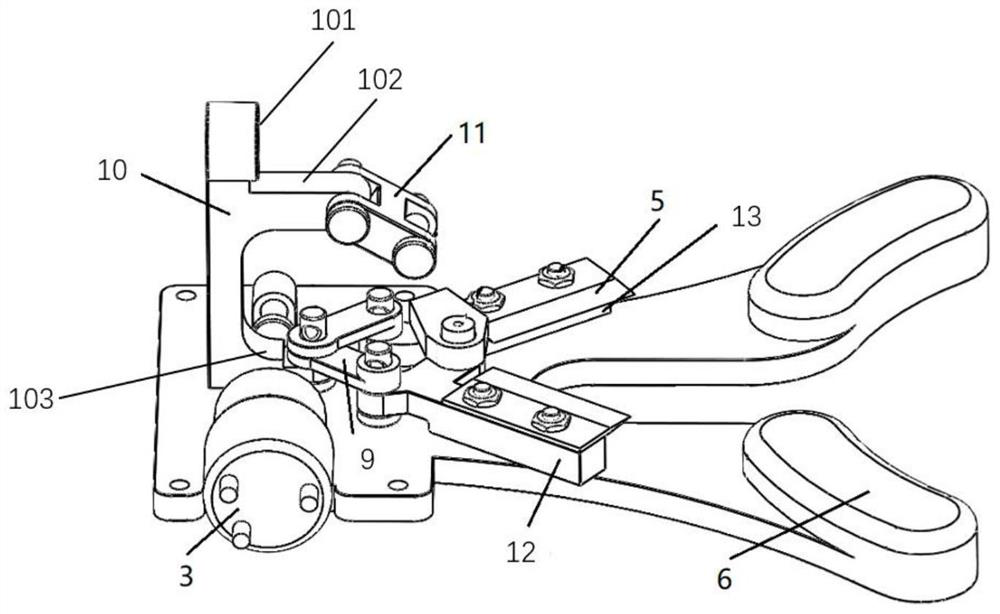
[0053] like Figure 1-Figure 5As shown, the present invention provides a double self-locking grasping and shearing integrated manipulator for potted vegetables, including: a screw reduction motor 1, a propulsion rod 10, a rocker 11, a scissor blade bracket connecting rod 9, a first mechanical finger 6, and a second mechanical finger 7. The first scissor blade support 12, the second scissor blade support 13;
[0054] The propulsion rod 10 is an inverted F shape, including an inner ring gear hole 101 at ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More