

Virtual simulation system for complex tasks of intelligent system
A technology for intelligent systems and complex tasks, applied in the field of virtual simulation, can solve problems such as the lack of an open source simulation rendering platform for intelligent systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] Examples of the present invention according to Figure 7 The open source technology framework shown in the figure builds the robot operation module, virtual rendering module, and user interaction module in turn, and presses Figure 8 As shown, these three modules are connected to each other to form a virtual simulation system for complex tasks of intelligent systems.
[0028] Step 1. Develop the robot operation module based on ROS under the Ubuntu operating system, integrate the robot kinematics, motion controller, and robot inverse kinematics corresponding to the physical robot, and manipulate and monitor the physical robot.
[0029] Step 2. Develop a virtual rendering module based on the open source rendering simulation engine osgEarth. The 3D model of the robot is exported by professional modeling software Solidworks, 3DMAX, etc., including assembly parameters and material lighting. The robot here includes both moving body and static body. During actual rendering, ...
Embodiment 2
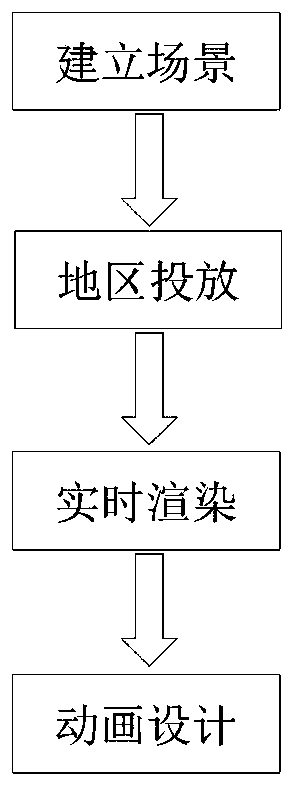
[0034] Examples of the present invention according to figure 1 As shown in the process, in the proposed virtual simulation system for complex tasks of intelligent systems, a scene is constructed according to the real robot model and the operating environment, and the scene is placed in a certain area on the surface of the earth in 3D-GIS, and then interacts with the real robot system to carry out Simulation rendering, interacting with users through traditional peripherals or VR and AR devices.
[0035] Step 1. According to the real robot model and operating environment, such as Figure 6 As shown, first construct a local virtual scene, such as image 3 . The model used can be modeled by 3DMAX and then imported into the scene design module of CyberEarth, and its pose can be adjusted with simple button operations, or it can be used to directly input fixed angles, Euler angles, quaternions, fourth-order pose transformation matrices, etc. way to adjust the pose precisely.
[0...
Embodiment 3
[0040] Examples of the present invention according to figure 1 In the process shown, in the proposed virtual simulation system for complex tasks of intelligent systems, a multi-UAV collaborative operation scenario is constructed according to the real UAV model and the requirements of complex task operations in wide-area and dynamic environments. And put it over the Wanglang Nature Reserve in the virtual world to simulate the 3D coverage and reconstruction. The screenshot of the simulation effect is as follows: Figure 9 .
[0041] Step 1. Start the simulation platform, create a new project, and load digital earth and large-scale geographic information images and elevation data.
[0042] Step 2. Import the static body model of the environment, and manipulate each module to perform operations such as translation and rotation to build a drone mission scene.
[0043] Step 3. Import or select the dynamic model of the multi-agent / UAV under the system model tree, and customize the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More